import numpy as np
import matplotlib.pyplot as plt
def simple_autoencoder_demo():
"""
Demonstrate autoencoder concepts with a simple example.
"""
# Generate 2D data on a 1D manifold (a noisy spiral)
np.random.seed(42)
n_points = 500
t = np.linspace(0, 4 * np.pi, n_points)
x1 = t * np.cos(t) + np.random.randn(n_points) * 0.3
x2 = t * np.sin(t) + np.random.randn(n_points) * 0.3
X = np.column_stack([x1, x2])
# Normalize
X = (X - X.mean(axis=0)) / X.std(axis=0)
# Simple linear autoencoder (equivalent to PCA)
# Encoder: project to 1D
# Find principal component
cov = np.cov(X.T)
eigenvalues, eigenvectors = np.linalg.eigh(cov)
pc1 = eigenvectors[:, -1] # Largest eigenvalue
# Encode (project)
z = X @ pc1 # 1D latent code
# Decode (reconstruct)
X_reconstructed = np.outer(z, pc1)
# Reconstruction error
mse = np.mean((X - X_reconstructed) ** 2)
# Visualization
fig, axes = plt.subplots(1, 3, figsize=(15, 5))
# Original data
axes[0].scatter(X[:, 0], X[:, 1], c=t, cmap='viridis', s=10, alpha=0.7)
axes[0].set_title('Original Data (2D)')
axes[0].set_xlabel('x₁')
axes[0].set_ylabel('x₂')
axes[0].axis('equal')
# Latent representation
axes[1].scatter(z, np.zeros_like(z), c=t, cmap='viridis', s=10, alpha=0.7)
axes[1].set_title('Latent Code (1D bottleneck)')
axes[1].set_xlabel('z')
axes[1].set_ylim(-0.5, 0.5)
# Reconstructed data
axes[2].scatter(X[:, 0], X[:, 1], c='gray', s=10, alpha=0.3, label='Original')
axes[2].scatter(X_reconstructed[:, 0], X_reconstructed[:, 1], c=t, cmap='viridis', s=10, alpha=0.7, label='Reconstructed')
axes[2].set_title(f'Reconstruction (MSE = {mse:.3f})')
axes[2].set_xlabel('x₁')
axes[2].set_ylabel('x₂')
axes[2].axis('equal')
axes[2].legend()
plt.tight_layout()
print(f"Compression: 2D → 1D (50% reduction)")
print(f"Reconstruction MSE: {mse:.4f}")
return z, X_reconstructed
# z, X_rec = simple_autoencoder_demo()20 Deep Learning: Training & Optimisation
NoteLearning Objectives
By the end of this chapter, you will be able to:
- Master deep neural network architectures and training techniques
- Understand optimization algorithms and their underlying mathematical principles
- Implement key deep learning components from scratch and with frameworks
- Apply best practices for model development and troubleshooting
- Compare biological and artificial optimization approaches
20.1 13.1 Neural Network Fundamentals
Deep learning has revolutionized AI by enabling models to learn hierarchical representations directly from data. At its core, deep learning is built on neural networks with multiple layers that progressively extract higher-level features.
 Figure 13.1: A multilayer perceptron with two hidden layers, showing how neurons connect between layers and activate through non-linear functions.
Figure 13.1: A multilayer perceptron with two hidden layers, showing how neurons connect between layers and activate through non-linear functions.
13.1.1 Multilayer Perceptrons
Multilayer perceptrons (MLPs) are the foundational architecture of deep learning, consisting of an input layer, one or more hidden layers, and an output layer.
import numpy as np
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
import torch.optim as optim
# Define a simple MLP using PyTorch
class SimpleMLP(nn.Module):
def __init__(self, input_size, hidden_sizes, output_size):
"""
A basic multilayer perceptron implementation.
Args:
input_size: Number of input features
hidden_sizes: List of hidden layer sizes
output_size: Number of output units
"""
super(SimpleMLP, self).__init__()
# Create a list to hold all layers
layers = []
# Input layer to first hidden layer
layers.append(nn.Linear(input_size, hidden_sizes[0]))
layers.append(nn.ReLU())
# Hidden layers
for i in range(len(hidden_sizes) - 1):
layers.append(nn.Linear(hidden_sizes[i], hidden_sizes[i+1]))
layers.append(nn.ReLU())
# Final layer
layers.append(nn.Linear(hidden_sizes[-1], output_size))
# Combine all layers into a sequential model
self.model = nn.Sequential(*layers)
def forward(self, x):
"""Forward pass through the network."""
return self.model(x)
# Create an example MLP
input_size = 10
hidden_sizes = [128, 64, 32]
output_size = 2
model = SimpleMLP(input_size, hidden_sizes, output_size)
# Display model architecture
print(model)The power of MLPs comes from their ability to approximate any continuous function with sufficient neurons in the hidden layers (universal approximation theorem).

13.1.2 Activation Functions
Activation functions introduce non-linearity into neural networks, allowing them to learn complex patterns.
def plot_activation_functions():
"""Plot common activation functions used in deep learning."""
# Generate input values
x = np.linspace(-5, 5, 1000)
# Calculate activation function outputs
sigmoid = 1 / (1 + np.exp(-x))
tanh = np.tanh(x)
relu = np.maximum(0, x)
leaky_relu = np.where(x > 0, x, 0.1 * x)
elu = np.where(x > 0, x, np.exp(x) - 1)
# Create plot
plt.figure(figsize=(12, 8))
plt.plot(x, sigmoid, label='Sigmoid')
plt.plot(x, tanh, label='Tanh')
plt.plot(x, relu, label='ReLU')
plt.plot(x, leaky_relu, label='Leaky ReLU')
plt.plot(x, elu, label='ELU')
plt.grid(True)
plt.legend()
plt.title('Common Activation Functions')
plt.xlabel('Input')
plt.ylabel('Output')
plt.axhline(y=0, color='k', linestyle='-', alpha=0.3)
plt.axvline(x=0, color='k', linestyle='-', alpha=0.3)
plt.tight_layout()
return pltCommon activation functions include:
- ReLU (Rectified Linear Unit): \(f(x) = \max(0, x)\)
- Pros: Fast computation, reduces vanishing gradient problem
- Cons: “Dying ReLU” problem (neurons can get stuck)
- Leaky ReLU: \(f(x) = \max(\alpha x, x)\) where \(\alpha\) is a small constant
- Pros: Addresses dying ReLU problem
- Cons: Performance improvement is often marginal
- Sigmoid: \(f(x) = \frac{1}{1 + e^{-x}}\)
- Pros: Outputs between 0 and 1, useful for binary classification
- Cons: Vanishing gradient problem for extreme inputs
- Tanh (Hyperbolic Tangent): \(f(x) = \tanh(x) = \frac{e^x - e^{-x}}{e^x + e^{-x}}\)
- Pros: Zero-centered, useful in recurrent networks
- Cons: Still suffers from vanishing gradient
- GELU (Gaussian Error Linear Unit): \(f(x) = x \cdot \Phi(x)\) where \(\Phi\) is the CDF of the standard normal distribution
- Pros: Smooth, better performance in transformers
- Cons: More computationally expensive
Recent architectures like transformers commonly use GELU, while CNNs often use ReLU or its variants.
13.1.3 Backpropagation Algorithm
Backpropagation is the cornerstone algorithm for training neural networks, efficiently computing gradients through the chain rule.
def manual_backpropagation_example():
"""
Demonstrate backpropagation with a simple 2-layer network.
"""
# Simple network: Input -> Hidden (2 neurons) -> Output
# Forward pass
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def sigmoid_derivative(x):
return x * (1 - x)
# Network parameters
input_size = 3
hidden_size = 2
output_size = 1
# Inputs and target
X = np.array([[0.1, 0.2, 0.3]])
y_true = np.array([[0.7]])
# Initialize weights and biases
np.random.seed(42)
W1 = np.random.randn(input_size, hidden_size)
b1 = np.zeros((1, hidden_size))
W2 = np.random.randn(hidden_size, output_size)
b2 = np.zeros((1, output_size))
# Forward pass
hidden_input = np.dot(X, W1) + b1
hidden_output = sigmoid(hidden_input)
final_input = np.dot(hidden_output, W2) + b2
y_pred = sigmoid(final_input)
# Calculate loss
loss = 0.5 * np.sum((y_pred - y_true) ** 2)
# Backpropagation
# Output layer error
output_error = y_pred - y_true
output_delta = output_error * sigmoid_derivative(y_pred)
# Hidden layer error
hidden_error = np.dot(output_delta, W2.T)
hidden_delta = hidden_error * sigmoid_derivative(hidden_output)
# Update weights and biases
learning_rate = 0.1
W2 -= learning_rate * np.dot(hidden_output.T, output_delta)
b2 -= learning_rate * np.sum(output_delta, axis=0, keepdims=True)
W1 -= learning_rate * np.dot(X.T, hidden_delta)
b1 -= learning_rate * np.sum(hidden_delta, axis=0, keepdims=True)
return {
'Initial prediction': y_pred[0][0],
'Target': y_true[0][0],
'Loss': loss,
'Output delta': output_delta[0][0],
'Hidden delta': hidden_delta[0]
}The backpropagation algorithm:
- Forward Pass: Compute outputs of all neurons from input to output
- Error Calculation: Compare network output with target to compute error
- Backward Pass: Propagate error backward to assign “responsibility” to each parameter
- Parameter Update: Adjust weights and biases using calculated gradients
While modern deep learning frameworks handle these calculations automatically through automatic differentiation, understanding backpropagation is crucial for developing intuition about neural network training.
13.1.4 Vanishing/Exploding Gradients
As neural networks get deeper, the problem of vanishing or exploding gradients becomes more severe:
def demonstrate_gradient_problems():
"""
Visualize vanishing/exploding gradient problems in deep networks.
"""
depths = list(range(1, 21))
# Vanishing gradient with sigmoid
vanishing_grads = [0.25 ** d for d in depths]
# Exploding gradient with poor initialization
exploding_grads = [1.5 ** d for d in depths]
# Plot
plt.figure(figsize=(10, 6))
plt.semilogy(depths, vanishing_grads, 'b-', label='Vanishing Gradient (sigmoid)')
plt.semilogy(depths, exploding_grads, 'r-', label='Exploding Gradient (poor init)')
plt.semilogy(depths, [0.1] * len(depths), 'g--', label='Stable Gradient (with techniques)')
plt.xlabel('Network Depth (layers)')
plt.ylabel('Gradient Magnitude (log scale)')
plt.title('Vanishing and Exploding Gradients in Deep Networks')
plt.legend()
plt.grid(True)
plt.tight_layout()
return pltSolutions to these gradient problems include:
- Careful weight initialization (e.g., He, Xavier/Glorot)
- Batch normalization
- Residual connections
- Gradient clipping
- Using activation functions that don’t saturate (e.g., ReLU)
20.2 13.2 Optimization Techniques
Training deep neural networks requires effective optimization algorithms. The choice of optimizer significantly impacts training speed and model performance.
 Figure 13.2: Comparison of different optimization algorithms showing convergence paths in a loss landscape. Modern approaches like Adam and RMSprop often converge faster and more reliably than vanilla SGD.
Figure 13.2: Comparison of different optimization algorithms showing convergence paths in a loss landscape. Modern approaches like Adam and RMSprop often converge faster and more reliably than vanilla SGD.
13.2.1 Stochastic Gradient Descent
Stochastic Gradient Descent (SGD) is the most fundamental optimization algorithm for neural networks:
def sgd_optimizer_example():
"""Implement basic SGD and variants."""
# Generate dummy data
np.random.seed(42)
X = np.random.randn(1000, 10)
w_true = np.random.randn(10, 1)
y = X @ w_true + 0.1 * np.random.randn(1000, 1)
# Initialize parameters
w = np.zeros((10, 1))
# SGD parameters
learning_rate = 0.01
batch_size = 32
epochs = 100
# Training loop
losses = []
for epoch in range(epochs):
# Shuffle data
indices = np.random.permutation(len(X))
X_shuffled = X[indices]
y_shuffled = y[indices]
epoch_losses = []
# Process mini-batches
for i in range(0, len(X), batch_size):
X_batch = X_shuffled[i:i+batch_size]
y_batch = y_shuffled[i:i+batch_size]
# Forward pass
y_pred = X_batch @ w
loss = np.mean((y_pred - y_batch) ** 2)
epoch_losses.append(loss)
# Backward pass (compute gradient)
grad = 2 * X_batch.T @ (y_pred - y_batch) / batch_size
# Update parameters
w = w - learning_rate * grad
losses.append(np.mean(epoch_losses))
return {
'weights': w,
'true_weights': w_true,
'final_loss': losses[-1],
'loss_history': losses
}SGD variants include: - Batch Gradient Descent: Uses the entire dataset per update - Mini-batch SGD: Uses small batches (typically 32-256 samples) - Online SGD: Updates using one sample at a time
13.2.2 Momentum and Adaptive Methods
Modern optimizers build upon SGD by introducing momentum or adaptive learning rates:
def compare_optimizers():
"""Compare convergence speed of different optimizers."""
import torch
import torch.nn as nn
import torch.optim as optim
# Define a simple problem
X = torch.randn(1000, 20)
y = torch.randn(1000, 1)
# Define model
model = nn.Sequential(
nn.Linear(20, 64),
nn.ReLU(),
nn.Linear(64, 1)
)
# Loss function
criterion = nn.MSELoss()
# Define optimizers
optimizers = {
'SGD': optim.SGD(model.parameters(), lr=0.01),
'SGD+Momentum': optim.SGD(model.parameters(), lr=0.01, momentum=0.9),
'Adam': optim.Adam(model.parameters(), lr=0.01),
'RMSprop': optim.RMSprop(model.parameters(), lr=0.01),
'AdamW': optim.AdamW(model.parameters(), lr=0.01, weight_decay=1e-4)
}
# Training loops
results = {}
for name, optimizer in optimizers.items():
# Reset model
model = nn.Sequential(
nn.Linear(20, 64),
nn.ReLU(),
nn.Linear(64, 1)
)
# Train
losses = []
for epoch in range(100):
optimizer.zero_grad()
outputs = model(X)
loss = criterion(outputs, y)
losses.append(loss.item())
loss.backward()
optimizer.step()
results[name] = losses
# Plot
plt.figure(figsize=(10, 6))
for name, loss_history in results.items():
plt.plot(loss_history, label=name)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Optimizer Convergence Comparison')
plt.legend()
plt.yscale('log')
plt.grid(True)
plt.tight_layout()
return pltKey optimization algorithms include:
- SGD with Momentum: Adds a fraction of the previous update to the current one, helping to escape local minima and accelerate convergence
- \(v_t = \gamma v_{t-1} + \eta - abla_\theta J(\theta)\)
- \(\theta = \theta - v_t\)
- Nesterov Accelerated Gradient: Computes gradient at the “looked-ahead” position for better convergence
- \(v_t = \gamma v_{t-1} + \eta - abla_\theta J(\theta - \gamma v_{t-1})\)
- \(\theta = \theta - v_t\)
- AdaGrad: Adapts learning rates per-parameter based on historical gradients
- \(\theta_{t+1} = \theta_t - \frac{\eta}{\sqrt{G_t + \epsilon}} \odot g_t\)
- RMSprop: Modifies AdaGrad to better handle non-convex functions by using an exponentially weighted moving average
- \(E[g^2]_t = \beta E[g^2]_{t-1} + (1-\beta) g_t^2\)
- \(\theta_{t+1} = \theta_t - \frac{\eta}{\sqrt{E[g^2]_t + \epsilon}} g_t\)
- Adam: Combines momentum and RMSprop ideas for robust performance
- \(m_t = \beta_1 m_{t-1} + (1-\beta_1) g_t\) (momentum)
- \(v_t = \beta_2 v_{t-1} + (1-\beta_2) g_t^2\) (RMSprop)
- \(\hat{m}_t = \frac{m_t}{1-\beta_1^t}\), \(\hat{v}_t = \frac{v_t}{1-\beta_2^t}\) (bias correction)
- \(\theta_{t+1} = \theta_t - \frac{\eta}{\sqrt{\hat{v}_t} + \epsilon} \hat{m}_t\)
Adam is currently the most widely used optimizer due to its robustness across different architectures and datasets.
13.2.3 Learning Rate Schedules
Learning rate scheduling can significantly improve training outcomes:
def learning_rate_schedules():
"""Visualize common learning rate schedules."""
epochs = np.arange(1, 101)
# Constant
constant_lr = [0.1] * 100
# Step decay
step_lr = [0.1 * (0.1 ** (e // 30)) for e in epochs]
# Exponential decay
exp_lr = [0.1 * np.exp(-0.03 * e) for e in epochs]
# Cosine annealing
cosine_lr = [0.1 * (1 + np.cos(np.pi * e / 100)) / 2 for e in epochs]
# Linear warmup + cosine decay
warmup = 10
warmup_cosine_lr = []
for e in epochs:
if e <= warmup:
lr = 0.1 * e / warmup
else:
lr = 0.1 * (1 + np.cos(np.pi * (e - warmup) / (100 - warmup))) / 2
warmup_cosine_lr.append(lr)
# Plot
plt.figure(figsize=(10, 6))
plt.plot(epochs, constant_lr, label='Constant')
plt.plot(epochs, step_lr, label='Step Decay')
plt.plot(epochs, exp_lr, label='Exponential Decay')
plt.plot(epochs, cosine_lr, label='Cosine Annealing')
plt.plot(epochs, warmup_cosine_lr, label='Warmup + Cosine')
plt.xlabel('Epoch')
plt.ylabel('Learning Rate')
plt.title('Learning Rate Schedules')
plt.legend()
plt.yscale('log')
plt.grid(True)
plt.tight_layout()
return pltPopular learning rate schedules include:
- Step Decay: Reduces learning rate by a factor after a set number of epochs
- Exponential Decay: Continuously decreases learning rate using an exponential function
- Cosine Annealing: Smoothly decreases learning rate following a cosine curve
- Cyclic Learning Rates: Cycles between lower and upper learning rate bounds
- One-Cycle Policy: Increases learning rate to a maximum, then decreases it
- Warmup + Decay: Gradually increases learning rate during initial epochs, then decays
13.2.4 Second-order Methods
While first-order methods like SGD use only gradient information, second-order methods incorporate curvature information:
def second_order_methods():
"""Compare first and second-order optimization methods."""
# Generate a 2D quadratic function with conditioning issues
def f(x, y):
return 0.01 * x**2 + 5 * y**2
def grad_f(x, y):
return np.array([0.02 * x, 10 * y])
def hessian_f(x, y):
return np.array([[0.02, 0], [0, 10]])
# Starting point
x0, y0 = 10.0, 2.0
# SGD trajectory
sgd_path = [(x0, y0)]
x, y = x0, y0
lr = 0.1
for _ in range(20):
g = grad_f(x, y)
x -= lr * g[0]
y -= lr * g[1]
sgd_path.append((x, y))
# Newton's method trajectory
newton_path = [(x0, y0)]
x, y = x0, y0
for _ in range(5): # Usually converges in fewer steps
g = grad_f(x, y)
H = hessian_f(x, y)
H_inv = np.linalg.inv(H)
update = H_inv @ g
x -= update[0]
y -= update[1]
newton_path.append((x, y))
# Plot
x_range = np.linspace(-10, 10, 100)
y_range = np.linspace(-2, 2, 100)
X, Y = np.meshgrid(x_range, y_range)
Z = f(X, Y)
plt.figure(figsize=(10, 8))
# Contour plot
plt.contour(X, Y, Z, 20, cmap='viridis', alpha=0.6)
# Plot paths
sgd_path = np.array(sgd_path)
newton_path = np.array(newton_path)
plt.plot(sgd_path[:, 0], sgd_path[:, 1], 'r.-', label='SGD', linewidth=2, markersize=8)
plt.plot(newton_path[:, 0], newton_path[:, 1], 'b.-', label="Newton's Method", linewidth=2, markersize=8)
plt.xlabel('x')
plt.ylabel('y')
plt.title("Comparison of First-Order vs. Second-Order Methods")
plt.legend()
plt.grid(True)
plt.tight_layout()
return pltSecond-order methods include:
- Newton’s Method: Uses the Hessian matrix (second derivatives) for updates
- \(\theta_{t+1} = \theta_t - H^{-1}(\theta_t) - abla_\theta J(\theta_t)\)
- Pros: Fast convergence near optimum
- Cons: Expensive Hessian computation and inversion
- Quasi-Newton Methods (e.g., BFGS, L-BFGS): Approximate the Hessian
- Pros: Faster than Newton’s method
- Cons: Still too expensive for large neural networks
- Natural Gradient Descent: Uses the Fisher information matrix
- Pros: Invariant to reparameterization
- Cons: Computation and storage requirements
While second-order methods offer theoretical advantages, their computational requirements generally make them impractical for deep learning. However, approximations like K-FAC (Kronecker-Factored Approximate Curvature) are being explored to make second-order information more accessible.
20.3 13.3 Regularization Strategies
Regularization helps prevent overfitting by constraining the model’s capacity or adding noise to the training process.
 Figure 13.3: Common regularization methods in deep learning, including dropout, weight decay (L2), batch normalization, data augmentation, early stopping, and label smoothing.
Figure 13.3: Common regularization methods in deep learning, including dropout, weight decay (L2), batch normalization, data augmentation, early stopping, and label smoothing.
13.3.1 Dropout and Batch Normalization
def dropout_example():
"""Implement and visualize dropout."""
import torch
import torch.nn as nn
# Define a model with dropout
class MLPWithDropout(nn.Module):
def __init__(self, dropout_rate=0.5):
super().__init__()
self.fc1 = nn.Linear(784, 256)
self.dropout1 = nn.Dropout(dropout_rate)
self.fc2 = nn.Linear(256, 128)
self.dropout2 = nn.Dropout(dropout_rate)
self.fc3 = nn.Linear(128, 10)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = self.dropout1(x)
x = torch.relu(self.fc2(x))
x = self.dropout2(x)
x = self.fc3(x)
return x
# Create a toy example for visualization
model = MLPWithDropout(dropout_rate=0.5)
# Generate random activations for demonstration
activations = torch.rand(1, 256)
# Apply dropout with different rates
dropout_rates = [0.0, 0.3, 0.5, 0.7]
results = []
for rate in dropout_rates:
dropout = nn.Dropout(rate)
# Set model to training mode
dropout.train()
# Apply dropout
dropped_activations = dropout(activations)
results.append((rate, dropped_activations[0].detach().numpy()))
# Visualize
fig, axes = plt.subplots(len(dropout_rates), 1, figsize=(10, 8))
for i, (rate, acts) in enumerate(results):
axes[i].bar(range(50), acts[:50], alpha=0.7) # Show first 50 units
axes[i].set_title(f'Dropout Rate: {rate}')
axes[i].set_ylim(0, 1.5) # Account for scaling during training
axes[i].grid(True, alpha=0.3)
plt.tight_layout()
return fig
def batch_norm_example():
"""Demonstrate batch normalization effect."""
import torch
import torch.nn as nn
# Create random activations
np.random.seed(42)
# Poorly scaled/shifted activations
activations = np.random.randn(100, 32) * 10 + 5
# Apply batch normalization
bn = nn.BatchNorm1d(32)
normalized = bn(torch.tensor(activations, dtype=torch.float32))
normalized = normalized.detach().numpy()
# Visualize
fig, axes = plt.subplots(2, 1, figsize=(10, 8))
# Plot raw activation distribution
for i in range(5): # Show first 5 features
axes[0].hist(activations[:, i], alpha=0.3, bins=20, label=f'Feature {i+1}')
axes[0].set_title('Before Batch Normalization')
axes[0].grid(True, alpha=0.3)
axes[0].legend()
# Plot normalized activation distribution
for i in range(5):
axes[1].hist(normalized[:, i], alpha=0.3, bins=20, label=f'Feature {i+1}')
axes[1].set_title('After Batch Normalization')
axes[1].grid(True, alpha=0.3)
axes[1].legend()
plt.tight_layout()
return figDropout stochastically zeroes activations during training, forcing the network to learn redundant representations:
- During training: Each neuron is kept with probability
p(typically 0.5 to 0.8) - During inference: All neurons are used, but outputs are scaled by
p
Batch Normalization normalizes activations within a mini-batch, making training more stable:
- Normalize: \(\hat{x}_i = \frac{x_i - \mu_B}{\sqrt{\sigma_B^2 + \epsilon}}\)
- Scale and shift: \(y_i = \gamma \hat{x}_i + \beta\)
Benefits include: - Reduced internal covariate shift - Improved gradient flow - Regularization effect - Reduced sensitivity to initialization
13.3.2 Weight Decay and Early Stopping
def weight_decay_visualization():
"""Visualize the effect of weight decay on model complexity."""
from sklearn.linear_model import Ridge
# Generate synthetic data
np.random.seed(42)
X = np.sort(np.random.rand(100, 1) * 6 - 3, axis=0)
y = np.sin(X.ravel()) + np.random.normal(0, 0.1, X.shape[0])
# Fit with different regularization strengths
alphas = [0, 0.001, 0.01, 0.1, 1.0]
degrees = 10 # polynomial degree
X_plot = np.linspace(-3, 3, 1000).reshape(-1, 1)
plt.figure(figsize=(12, 8))
for i, alpha in enumerate(alphas):
# Create polynomial features
from sklearn.preprocessing import PolynomialFeatures
from sklearn.pipeline import make_pipeline
model = make_pipeline(
PolynomialFeatures(degrees),
Ridge(alpha=alpha)
)
model.fit(X, y)
y_plot = model.predict(X_plot)
plt.subplot(len(alphas), 1, i+1)
plt.scatter(X, y, color='navy', s=30, marker='o', label="Training data")
plt.plot(X_plot, y_plot, color='red', label="Model")
plt.plot(X_plot, np.sin(X_plot.ravel()), color='green', label="True function")
plt.title(f"Weight Decay (L2): α = {alpha}")
plt.ylim((-1.5, 1.5))
plt.legend()
plt.tight_layout()
return plt
def plot_early_stopping():
"""Visualize early stopping based on validation performance."""
# Simulate training and validation losses
epochs = np.arange(1, 101)
# Training loss (continues to decrease)
train_loss = 1.0 / (0.1 * epochs + 1.0) + 0.1
# Validation loss (starts increasing after a while)
val_loss = 1.0 / (0.1 * epochs + 1.0) + 0.1 + 0.05 * np.maximum(0, epochs - 40) / 60
# Add noise
np.random.seed(42)
train_loss += np.random.normal(0, 0.02, len(epochs))
val_loss += np.random.normal(0, 0.03, len(epochs))
# Determine early stopping point
patience = 10
best_val_loss = float('inf')
best_epoch = 0
stop_epoch = 0
for i, loss in enumerate(val_loss):
if loss < best_val_loss:
best_val_loss = loss
best_epoch = i
elif i > best_epoch + patience:
stop_epoch = i
break
# Plot
plt.figure(figsize=(10, 6))
plt.plot(epochs, train_loss, 'b-', label='Training Loss')
plt.plot(epochs, val_loss, 'r-', label='Validation Loss')
# Mark early stopping point
if stop_epoch > 0:
plt.axvline(x=stop_epoch, color='g', linestyle='--', label=f'Early Stopping (Epoch {stop_epoch})')
# Mark best validation point
plt.axvline(x=best_epoch, color='m', linestyle=':', label=f'Best Validation (Epoch {best_epoch})')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.title('Early Stopping Based on Validation Loss')
plt.legend()
plt.grid(True)
plt.tight_layout()
return pltWeight Decay (L2 regularization) adds a penalty term to the loss function proportional to the squared weights:
\(L_{reg} = L_{original} + \lambda \sum_i w_i^2\)
This encourages the model to use smaller weights, reducing model complexity and preventing overfitting.
Early Stopping halts training when performance on a validation set stops improving:
- Monitor validation performance at regular intervals
- Save the model when it achieves the best validation performance
- Stop training after a predefined number of epochs without improvement (patience)
- Restore the best model from the saved checkpoint
Early stopping effectively limits the model’s capacity by restricting the number of optimization steps.
13.3.3 Data Augmentation
def data_augmentation_example():
"""Demonstrate common data augmentation techniques."""
try:
from PIL import Image
import torchvision.transforms as transforms
import torchvision.transforms.functional as TF
# Create a sample image (a simple placeholder)
img = Image.new('RGB', (300, 200), color=(73, 109, 137))
# Define augmentations
augmentations = [
('Original', lambda x: x),
('Horizontal Flip', TF.hflip),
('Rotation (30°)', lambda x: TF.rotate(x, 30)),
('Random Crop', lambda x: TF.crop(x, 50, 50, 150, 100)),
('Color Jitter', lambda x: transforms.ColorJitter(brightness=0.5, contrast=0.5, saturation=0.5)(x)),
('Random Erasing', lambda x: transforms.RandomErasing(p=1.0, scale=(0.02, 0.1))(transforms.ToTensor()(x)))
]
# Apply and visualize
fig, axes = plt.subplots(2, 3, figsize=(12, 8))
axes = axes.flatten()
for i, (name, aug_fn) in enumerate(augmentations):
if name == 'Random Erasing':
# Special case for random erasing which expects a tensor
axes[i].imshow(aug_fn.permute(1, 2, 0))
else:
axes[i].imshow(aug_fn(img))
axes[i].set_title(name)
axes[i].axis('off')
plt.tight_layout()
return fig
except ImportError:
# If PIL or torchvision not available, return a text figure
fig, ax = plt.subplots(figsize=(10, 6))
ax.text(0.5, 0.5, "Data Augmentation Techniques: - - " +
"• Horizontal/Vertical Flips - " +
"• Random Rotations - " +
"• Random Crops - " +
"• Color Jitter (brightness, contrast, saturation) - " +
"• Random Erasing - " +
"• Cutout/CutMix/MixUp - " +
"• Elastic Transformations",
horizontalalignment='center',
verticalalignment='center',
fontsize=14)
ax.axis('off')
return figData augmentation artificially increases the size of the training set by applying transformations to the original data:
- Image Augmentations: Flips, rotations, crops, color adjustments, random erasing
- Advanced Techniques: Mixup (blend images and labels), CutMix (patch replacement), AugMix (augmentation chains)
- Text Augmentations: Synonym replacement, word insertion/deletion, back-translation
- Audio Augmentations: Time stretching, pitch shifting, noise addition, spectrogram masking
Benefits include: - Improved generalization - Robustness to variations - Reduced overfitting - Better class balance
13.3.4 Label Smoothing
def label_smoothing_example():
"""Demonstrate the effect of label smoothing on model confidence."""
# Calculate softmax probabilities
def softmax(x):
e_x = np.exp(x - np.max(x))
return e_x / e_x.sum()
# Loss functions
def cross_entropy(probs, label, epsilon=0.0):
"""Cross entropy with optional label smoothing."""
n_classes = len(probs)
# Create one-hot encoding
targets = np.zeros_like(probs)
targets[label] = 1.0
if epsilon > 0:
# Apply label smoothing
targets = (1 - epsilon) * targets + epsilon / n_classes
# Compute loss
return -np.sum(targets * np.log(probs + 1e-9))
# Generate some logits
logits_correct = np.array([10.0, 2.0, 1.0, 0.5, 0.1]) # Strongly predicting class 0 (correct)
logits_wrong = np.array([2.0, 10.0, 1.0, 0.5, 0.1]) # Strongly predicting class 1 (wrong)
probs_correct = softmax(logits_correct)
probs_wrong = softmax(logits_wrong)
# Class 0 is the true label
true_label = 0
# Compare losses with and without label smoothing
smoothing_values = [0.0, 0.1, 0.2]
results = []
for epsilon in smoothing_values:
loss_correct = cross_entropy(probs_correct, true_label, epsilon)
loss_wrong = cross_entropy(probs_wrong, true_label, epsilon)
results.append({
'epsilon': epsilon,
'loss_correct': loss_correct,
'loss_wrong': loss_wrong,
'ratio': loss_wrong / loss_correct
})
# Create comparison plot
fig, axes = plt.subplots(1, 2, figsize=(12, 6))
# Plot probabilities
bar_positions = np.arange(5)
axes[0].bar(bar_positions - 0.2, probs_correct, width=0.4, label='Correct Prediction')
axes[0].bar(bar_positions + 0.2, probs_wrong, width=0.4, label='Incorrect Prediction')
axes[0].set_xticks(bar_positions)
axes[0].set_xticklabels([f'Class {i}' for i in range(5)])
axes[0].set_ylabel('Probability')
axes[0].set_title('Model Predictions')
axes[0].legend()
# Plot loss comparisons
eps_values = [r['epsilon'] for r in results]
correct_losses = [r['loss_correct'] for r in results]
wrong_losses = [r['loss_wrong'] for r in results]
ratios = [r['ratio'] for r in results]
ax1 = axes[1]
ax1.plot(eps_values, correct_losses, 'b-o', label='Loss (Correct)')
ax1.plot(eps_values, wrong_losses, 'r-o', label='Loss (Incorrect)')
ax1.set_xlabel('Label Smoothing (ε)')
ax1.set_ylabel('Loss Value')
ax1.set_title('Effect of Label Smoothing on Loss')
ax1.legend(loc='upper left')
ax2 = ax1.twinx()
ax2.plot(eps_values, ratios, 'g--s', label='Loss Ratio (Wrong/Correct)')
ax2.set_ylabel('Loss Ratio', color='g')
ax2.tick_params(axis='y', labelcolor='g')
ax2.legend(loc='upper right')
plt.tight_layout()
return figLabel smoothing replaces one-hot encoded targets with “soft” targets:
\(y_i = \begin{cases} 1 - \epsilon + \epsilon/K & \text{if } i = \text{true class} \\ \epsilon/K & \text{otherwise} \end{cases}\)
where \(\epsilon\) is the smoothing parameter and \(K\) is the number of classes.
Benefits include: - Prevents overconfidence - Improves generalization - Provides regularization - Aligns better with inherent data ambiguity
20.4 13.4 Advanced Architectures
Modern deep learning has evolved sophisticated architectures for different domains.
 Figure 13.4: Key architectural patterns in modern deep learning, including CNNs, ResNets, Inception modules, and Transformer blocks, each addressing specific model design challenges.
Figure 13.4: Key architectural patterns in modern deep learning, including CNNs, ResNets, Inception modules, and Transformer blocks, each addressing specific model design challenges.
13.4.1 Convolutional Neural Networks
def visualize_cnn_architecture():
"""Visualize a basic CNN architecture."""
fig, ax = plt.subplots(figsize=(12, 5))
# Define architecture components
components = [
{"name": "Input", "shape": (64, 64, 3), "x": 0.1, "width": 0.1},
{"name": "Conv 3x3 - 64 filters", "shape": (32, 32, 64), "x": 0.25, "width": 0.1},
{"name": "Conv 3x3 - 128 filters", "shape": (16, 16, 128), "x": 0.4, "width": 0.1},
{"name": "MaxPool - 2x2", "shape": (8, 8, 128), "x": 0.55, "width": 0.07},
{"name": "Flatten", "shape": "(8192,)", "x": 0.67, "width": 0.05},
{"name": "Dense - 512 units", "shape": "(512,)", "x": 0.77, "width": 0.08},
{"name": "Dense - 10 units", "shape": "(10,)", "x": 0.9, "width": 0.05}
]
# Draw boxes
for i, comp in enumerate(components):
color = plt.cm.viridis(i / len(components))
height = min(0.2 + 0.05 * i, 0.5)
# Draw component box
rect = plt.Rectangle(
(comp["x"], 0.5 - height/2),
comp["width"], height,
facecolor=color, alpha=0.7, edgecolor='black'
)
ax.add_patch(rect)
# Add labels
ax.text(comp["x"] + comp["width"]/2, 0.5, comp["name"],
ha='center', va='center', fontsize=10, fontweight='bold')
ax.text(comp["x"] + comp["width"]/2, 0.5 - height/2 - 0.05, str(comp["shape"]),
ha='center', va='top', fontsize=8)
# Add connecting arrows
if i > 0:
prev = components[i-1]
ax.annotate("",
xy=(comp["x"], 0.5),
xytext=(prev["x"] + prev["width"], 0.5),
arrowprops=dict(arrowstyle="-|>", color='black'))
# Label axes
ax.text(0.5, 0.95, "Convolutional Neural Network Architecture",
ha='center', va='center', fontsize=14, fontweight='bold')
# Set limits
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.axis('off')
plt.tight_layout()
return figCNNs use specialized layers designed for processing grid-like data (e.g., images):
- Convolutional Layers: Apply filters to detect local patterns
- Parameters: filter size, stride, padding, dilation
- Properties: weight sharing, translation invariance
- Pooling Layers: Downsample feature maps
- Types: max pooling, average pooling, global pooling
- Purpose: Reduce dimensions, introduce invariance
- Feature Hierarchy: Early layers detect edges and textures; later layers detect complex shapes and objects
Notable CNN architectures include: - LeNet-5: First successful CNN architecture - AlexNet: Breakthrough in image classification (2012) - VGG: Standardized architecture with small filters - Inception/GoogLeNet: Parallel filter operations at different scales - ResNet: Introduced residual connections, enabling extremely deep networks
13.4.2 Residual Networks
def visualize_residual_block():
"""Visualize a residual block from ResNet."""
fig, ax = plt.subplots(figsize=(8, 6))
# Draw main path
# Input
rect_input = plt.Rectangle((0.3, 0.8), 0.4, 0.1, facecolor='lightblue', edgecolor='black')
ax.add_patch(rect_input)
ax.text(0.5, 0.85, "Input", ha='center', va='center')
# Conv 1
rect_conv1 = plt.Rectangle((0.3, 0.65), 0.4, 0.1, facecolor='lightgreen', edgecolor='black')
ax.add_patch(rect_conv1)
ax.text(0.5, 0.7, "Conv 3x3", ha='center', va='center')
# Batch Norm 1
rect_bn1 = plt.Rectangle((0.3, 0.55), 0.4, 0.05, facecolor='lightyellow', edgecolor='black')
ax.add_patch(rect_bn1)
ax.text(0.5, 0.575, "BatchNorm", ha='center', va='center')
# ReLU 1
rect_relu1 = plt.Rectangle((0.3, 0.5), 0.4, 0.05, facecolor='lightpink', edgecolor='black')
ax.add_patch(rect_relu1)
ax.text(0.5, 0.525, "ReLU", ha='center', va='center')
# Conv 2
rect_conv2 = plt.Rectangle((0.3, 0.35), 0.4, 0.1, facecolor='lightgreen', edgecolor='black')
ax.add_patch(rect_conv2)
ax.text(0.5, 0.4, "Conv 3x3", ha='center', va='center')
# Batch Norm 2
rect_bn2 = plt.Rectangle((0.3, 0.25), 0.4, 0.05, facecolor='lightyellow', edgecolor='black')
ax.add_patch(rect_bn2)
ax.text(0.5, 0.275, "BatchNorm", ha='center', va='center')
# Addition
circle_add = plt.Circle((0.5, 0.15), 0.05, facecolor='white', edgecolor='black')
ax.add_patch(circle_add)
ax.text(0.5, 0.15, "+", ha='center', va='center', fontsize=15, fontweight='bold')
# Output
rect_output = plt.Rectangle((0.3, 0.05), 0.4, 0.05, facecolor='lightblue', edgecolor='black')
ax.add_patch(rect_output)
ax.text(0.5, 0.075, "Output", ha='center', va='center')
# ReLU (final)
rect_relu2 = plt.Rectangle((0.3, 0), 0.4, 0.05, facecolor='lightpink', edgecolor='black')
ax.add_patch(rect_relu2)
ax.text(0.5, 0.025, "ReLU", ha='center', va='center')
# Draw shortcut path
ax.plot([0.5, 0.7, 0.7, 0.5], [0.8, 0.8, 0.15, 0.15], 'r-', linewidth=2)
ax.text(0.7, 0.45, "Shortcut Connection", ha='center', va='center', rotation=90, color='red')
# Draw arrows
arrow_props = dict(arrowstyle='->', color='black', linewidth=1.5)
ax.annotate('', xy=(0.5, 0.65), xytext=(0.5, 0.7), arrowprops=arrow_props)
ax.annotate('', xy=(0.5, 0.55), xytext=(0.5, 0.6), arrowprops=arrow_props)
ax.annotate('', xy=(0.5, 0.5), xytext=(0.5, 0.55), arrowprops=arrow_props)
ax.annotate('', xy=(0.5, 0.35), xytext=(0.5, 0.4), arrowprops=arrow_props)
ax.annotate('', xy=(0.5, 0.25), xytext=(0.5, 0.3), arrowprops=arrow_props)
ax.annotate('', xy=(0.5, 0.15), xytext=(0.5, 0.2), arrowprops=arrow_props)
ax.annotate('', xy=(0.5, 0.05), xytext=(0.5, 0.1), arrowprops=arrow_props)
ax.annotate('', xy=(0.5, 0), xytext=(0.5, 0.05), arrowprops=arrow_props)
# Title
ax.text(0.5, 0.95, "ResNet Block", ha='center', va='center', fontsize=14, fontweight='bold')
# Set limits
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.axis('off')
plt.tight_layout()
return figResidual Networks (ResNets) introduced skip connections to address the degradation problem in very deep networks:
\(\mathbf{y} = F(\mathbf{x}, \{W_i\}) + \mathbf{x}\)
where \(F\) represents the residual mapping and \(\mathbf{x}\) is the identity shortcut connection.
Benefits include: - Easier optimization (shortcuts provide gradient highways) - Better gradient flow in very deep networks - Stabilized training - State-of-the-art performance on many tasks
Variants of residual connections include: - Pre-activation ResNet: Improved ordering of batch normalization and activation - ResNeXt: Grouped convolutions for increased width - DenseNet: Dense connections between all layers in a block - EfficientNet: Balanced network depth, width, and resolution scaling
13.4.3 Normalization Techniques
def compare_normalizations():
"""Visualize differences between normalization techniques."""
# Create toy feature maps (B, C, H, W)
np.random.seed(42)
batch_size = 4
channels = 3
height = 4
width = 4
# Create feature maps with different distributions per channel
features = np.zeros((batch_size, channels, height, width))
# Channel 0: Normal distribution with mean 10, std 5
features[:, 0, :, :] = np.random.normal(10, 5, (batch_size, height, width))
# Channel 1: Normal distribution with mean 0, std 1
features[:, 1, :, :] = np.random.normal(0, 1, (batch_size, height, width))
# Channel 2: Normal distribution with mean -5, std 3
features[:, 2, :, :] = np.random.normal(-5, 3, (batch_size, height, width))
# Apply different normalizations (simplified implementations)
# Batch Normalization (normalize across batch, per channel)
batch_norm = np.zeros_like(features)
for c in range(channels):
mean = np.mean(features[:, c, :, :])
std = np.std(features[:, c, :, :])
batch_norm[:, c, :, :] = (features[:, c, :, :] - mean) / (std + 1e-5)
# Layer Normalization (normalize across channels, per sample)
layer_norm = np.zeros_like(features)
for b in range(batch_size):
mean = np.mean(features[b, :, :, :])
std = np.std(features[b, :, :, :])
layer_norm[b, :, :, :] = (features[b, :, :, :] - mean) / (std + 1e-5)
# Instance Normalization (normalize across spatial dims, per sample and channel)
instance_norm = np.zeros_like(features)
for b in range(batch_size):
for c in range(channels):
mean = np.mean(features[b, c, :, :])
std = np.std(features[b, c, :, :])
instance_norm[b, c, :, :] = (features[b, c, :, :] - mean) / (std + 1e-5)
# Group Normalization (normalize across spatial dims and channel groups, per sample)
group_size = 1 # 1 group with 3 channels for this example
group_norm = np.zeros_like(features)
for b in range(batch_size):
for g in range(0, channels, group_size):
mean = np.mean(features[b, g:g+group_size, :, :])
std = np.std(features[b, g:g+group_size, :, :])
group_norm[b, g:g+group_size, :, :] = (features[b, g:g+group_size, :, :] - mean) / (std + 1e-5)
# Create visualizations
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
# Helper function to visualize feature map distributions
def plot_distributions(ax, data, title):
flat_data_by_channel = [data[:, c, :, :].flatten() for c in range(channels)]
for c, channel_data in enumerate(flat_data_by_channel):
ax.hist(channel_data, bins=20, alpha=0.7, label=f'Channel {c}')
ax.set_title(title)
ax.grid(True, alpha=0.3)
ax.legend()
# Plot distributions
plot_distributions(axes[0, 0], features, 'Original Features')
plot_distributions(axes[0, 1], batch_norm, 'Batch Normalization')
plot_distributions(axes[0, 2], layer_norm, 'Layer Normalization')
plot_distributions(axes[1, 0], instance_norm, 'Instance Normalization')
plot_distributions(axes[1, 1], group_norm, 'Group Normalization')
# Diagram of normalization dimensions
axes[1, 2].axis('off')
axes[1, 2].text(0.5, 0.9, 'Normalization Dimensions', ha='center', fontsize=12, fontweight='bold')
axes[1, 2].text(0.5, 0.75, 'BatchNorm: Normalize across (N, H, W)', ha='center')
axes[1, 2].text(0.5, 0.65, 'LayerNorm: Normalize across (C, H, W)', ha='center')
axes[1, 2].text(0.5, 0.55, 'InstanceNorm: Normalize across (H, W)', ha='center')
axes[1, 2].text(0.5, 0.45, 'GroupNorm: Normalize across (G, H, W)', ha='center')
axes[1, 2].text(0.5, 0.3, 'N: Batch size, C: Channels', ha='center')
axes[1, 2].text(0.5, 0.2, 'H: Height, W: Width, G: Group', ha='center')
plt.tight_layout()
return figDifferent normalization techniques stabilize training by normalizing activations:
- Batch Normalization: Normalizes across the batch dimension
- Pros: Very effective, improves training speed
- Cons: Batch size dependent, less effective with small batches
- \(\hat{x}_i = \frac{x_i - \mu_B}{\sqrt{\sigma_B^2 + \epsilon}}\)
- Layer Normalization: Normalizes across all features for each sample
- Pros: Batch size independent, good for recurrent networks
- Cons: May not work well for CNNs
- \(\hat{x}_i = \frac{x_i - \mu_L}{\sqrt{\sigma_L^2 + \epsilon}}\)
- Instance Normalization: Normalizes across spatial dimensions for each channel and sample
- Pros: Effective for style transfer, independent of batch size
- Cons: Loses statistical information about the dataset
- \(\hat{x}_{ijk} = \frac{x_{ijk} - \mu_{ij}}{\sqrt{\sigma_{ij}^2 + \epsilon}}\)
- Group Normalization: Normalizes across groups of channels
- Pros: Batch size independent, works well for smaller batches
- Cons: Group size is a hyperparameter to tune
- \(\hat{x}_{ijg} = \frac{x_{ijg} - \mu_{ig}}{\sqrt{\sigma_{ig}^2 + \epsilon}}\)
Choosing the right normalization technique depends on the architecture, task, and computational constraints.
13.4.4 Activation Functions
Modern activation functions improve on traditional ones like sigmoid and tanh:
- ReLU: Most common, but suffers from dying neurons
- Leaky ReLU: Prevents dying neurons with a small slope for negative inputs
- Parametric ReLU (PReLU): Learns the slope parameter during training
- ELU (Exponential Linear Unit): Smooth negative values with an exponential curve
- GELU (Gaussian Error Linear Unit): Used in transformers, approximates \(x \cdot \Phi(x)\)
- Swish/SiLU: Self-gated activation \(x \cdot \sigma(x)\), often outperforms ReLU
- Mish: Smooth alternative to Swish with better performance
13.4.5 Graph Neural Networks
Graph Neural Networks (GNNs) are a class of neural networks designed to operate on graph-structured data. They are particularly powerful for tasks involving relationships and interactions, such as social network analysis, molecular chemistry, and recommendation systems.
The core idea behind GNNs is message passing, where nodes iteratively update their feature representations by aggregating information from their neighbors.
def visualize_gnn_message_passing():
"""Visualize the GNN message passing mechanism."""
import networkx as nx
fig, ax = plt.subplots(1, 2, figsize=(12, 5))
# Create a simple graph
G = nx.Graph()
G.add_edges_from([(1, 2), (1, 3), (2, 3), (2, 4), (3, 5)])
pos = nx.spring_layout(G, seed=42)
# --- Initial State ---
ax[0].set_title("Step 1: Initial Node Features")
nx.draw(G, pos, ax=ax[0], with_labels=True, node_color='lightblue',
node_size=1000, font_size=12, font_weight='bold')
# --- Message Passing ---
ax[1].set_title("Step 2: Node 2 Gathers Messages")
# Highlight node 2 and its neighbors
node_colors = ['lightgreen' if n == 2 else 'orange' if n in [1, 3, 4] else 'lightblue' for n in G.nodes()]
nx.draw(G, pos, ax=ax[1], with_labels=True, node_color=node_colors,
node_size=1000, font_size=12, font_weight='bold')
# Draw arrows for message passing
for neighbor in [1, 3, 4]:
ax[1].annotate("",
xy=pos[2], xycoords='data',
xytext=pos[neighbor], textcoords='data',
arrowprops=dict(arrowstyle="->", color="red", lw=2))
ax[1].text(pos[2][0], pos[2][1] + 0.2, "Aggregate", ha='center', fontsize=12, fontweight='bold')
plt.tight_layout()
return figA GNN layer updates a node’s representation \(h_i\) using the following general formula: \(h_i^{(l+1)} = \text{UPDATE}^{(l)} \left( h_i^{(l)}, \text{AGGREGATE}^{(l)} \left( \{ h_j^{(l)} : j \in \mathcal{N}(i) \} \right) \right)\)
Where: - \(h_i^{(l)}\) is the feature vector of node \(i\) at layer \(l\). - \(\mathcal{N}(i)\) is the set of neighbors of node \(i\). - AGGREGATE is a function that combines messages from neighbors (e.g., sum, mean, max). - UPDATE is a function (often a neural network) that combines the aggregated message with the node’s own representation.
Example with PyTorch Geometric: Here is a simple GNN for node classification on the Cora dataset. Note that this requires torch_geometric to be installed.
def gnn_example_pytorch_geometric():
"""
A simple GNN for node classification using PyTorch Geometric.
This code is illustrative and requires installation of torch,
torch_geometric, and a dataset like Cora.
"""
try:
import torch
import torch.nn.functional as F
from torch_geometric.nn import GCNConv
from torch_geometric.datasets import Planetoid
# Load the Cora dataset
dataset = Planetoid(root='/tmp/Cora', name='Cora')
data = dataset[0]
class GCN(torch.nn.Module):
def __init__(self):
super().__init__()
self.conv1 = GCNConv(dataset.num_node_features, 16)
self.conv2 = GCNConv(16, dataset.num_classes)
def forward(self, data):
x, edge_index = data.x, data.edge_index
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, training=self.training)
x = self.conv2(x, edge_index)
return F.log_softmax(x, dim=1)
# Model and optimizer
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = GCN().to(device)
data = data.to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.01, weight_decay=5e-4)
# Training loop (simplified)
model.train()
for epoch in range(5): # Reduced epochs for demonstration
optimizer.zero_grad()
out = model(data)
loss = F.nll_loss(out[data.train_mask], data.y[data.train_mask])
loss.backward()
optimizer.step()
return "GCN model created and trained for 5 epochs."
except ImportError:
return "PyTorch Geometric not found. Please install it to run this example."Notable GNN architectures include: - Graph Convolutional Networks (GCNs): Simplify graph convolutions using a spectral approach. - Graph Attention Networks (GATs): Use attention mechanisms to weigh the importance of different neighbors. - GraphSAGE: A general, inductive framework that samples neighbors to improve scalability. - Graph Isomorphism Networks (GINs): A theoretically powerful GNN variant.
GNNs have strong parallels with brain networks (connectomes), making them a critical tool in computational neuroscience for analyzing brain structure and function.
20.5 13.5 Biological Parallels in Deep Learning
Deep learning draws significant inspiration from neuroscience, though the connections are often overlooked in technical discussions. This section explores the parallels between neural networks and biological neural systems.
 Figure 13.5: Comparison of biological and artificial neurons, highlighting similarities and differences in structure and learning mechanisms.
Figure 13.5: Comparison of biological and artificial neurons, highlighting similarities and differences in structure and learning mechanisms.
13.5.1 Neural Architectures and Brain Organization
While artificial neural networks are highly simplified compared to biological neurons, several architectural principles are shared:
Hierarchical Processing: Both biological visual systems and CNNs process information in a hierarchical manner, with early layers detecting simple features and deeper layers representing more complex patterns.
Recurrent Connections: Recurrent neural networks parallel the recurrent connectivity in cortical circuits, allowing for temporal processing and memory.
Attention Mechanisms: Neural attention mechanisms are inspired by biological attention systems that selectively focus computational resources on relevant input features.
def biological_vs_artificial_neurons():
"""Compare biological and artificial neurons."""
# Create a simple diagram
fig, ax = plt.subplots(2, 1, figsize=(10, 8))
# Biological neuron (simplified)
ax[0].set_title("Biological Neuron")
ax[0].axis('off')
ax[0].text(0.1, 0.7, "Dendrites", fontsize=12)
ax[0].text(0.5, 0.7, "Soma", fontsize=12)
ax[0].text(0.8, 0.7, "Axon", fontsize=12)
ax[0].text(0.9, 0.4, "Synapses", fontsize=12)
# Draw simplified neuron
ax[0].plot([0.1, 0.4], [0.5, 0.5], 'k-', linewidth=2) # Dendrite
ax[0].plot([0.2, 0.35], [0.6, 0.5], 'k-', linewidth=2) # Dendrite
ax[0].plot([0.3, 0.4], [0.4, 0.5], 'k-', linewidth=2) # Dendrite
circle = plt.Circle((0.5, 0.5), 0.1, fill=True, color='lightgray')
ax[0].add_patch(circle) # Soma
ax[0].plot([0.6, 0.9], [0.5, 0.5], 'k-', linewidth=2) # Axon
ax[0].plot([0.9, 0.95], [0.5, 0.3], 'k-', linewidth=1) # Synapse
ax[0].plot([0.9, 0.95], [0.5, 0.5], 'k-', linewidth=1) # Synapse
ax[0].plot([0.9, 0.95], [0.5, 0.7], 'k-', linewidth=1) # Synapse
# Artificial neuron
ax[1].set_title("Artificial Neuron")
ax[1].axis('off')
ax[1].text(0.05, 0.6, "$x_1$", fontsize=12)
ax[1].text(0.05, 0.5, "$x_2$", fontsize=12)
ax[1].text(0.05, 0.3, "$x_n$", fontsize=12)
ax[1].text(0.3, 0.7, "$w_1$", fontsize=10)
ax[1].text(0.3, 0.55, "$w_2$", fontsize=10)
ax[1].text(0.3, 0.3, "$w_n$", fontsize=10)
ax[1].text(0.4, 0.2, "Bias", fontsize=10)
ax[1].text(0.5, 0.5, "sum", fontsize=18)
ax[1].text(0.7, 0.5, "σ", fontsize=16)
ax[1].text(0.9, 0.5, "Output", fontsize=12)
# Draw artificial neuron
ax[1].plot([0.1, 0.4], [0.6, 0.5], 'k-', linewidth=1) # Input 1
ax[1].plot([0.1, 0.4], [0.5, 0.5], 'k-', linewidth=1) # Input 2
ax[1].plot([0.1, 0.4], [0.3, 0.5], 'k-', linewidth=1) # Input n
ax[1].plot([0.4, 0.4], [0.3, 0.5], 'k:', linewidth=1) # ...
ax[1].plot([0.4, 0.5], [0.3, 0.5], 'k-', linewidth=1) # Input n connection
circle1 = plt.Circle((0.5, 0.5), 0.05, fill=True, color='lightgray')
ax[1].add_patch(circle1) # Summation
ax[1].plot([0.55, 0.65], [0.5, 0.5], 'k-', linewidth=1) # To activation
circle2 = plt.Circle((0.7, 0.5), 0.05, fill=True, color='lightgray')
ax[1].add_patch(circle2) # Activation
ax[1].plot([0.75, 0.85], [0.5, 0.5], 'k-', linewidth=1) # Output
plt.tight_layout()
return fig13.5.2 Learning Mechanisms
The brain employs various learning mechanisms that have counterparts in deep learning:
Hebbian Learning vs. Backpropagation: Hebbian learning (“neurons that fire together, wire together”) is a local learning rule, while backpropagation propagates errors globally. Recent research explores biologically plausible alternatives to backpropagation, such as target propagation and feedback alignment.
Neuromodulation vs. Adaptive Learning Rates: Neuromodulatory systems in the brain (dopamine, acetylcholine, etc.) regulate plasticity and learning, similar to how adaptive learning rate methods (Adam, RMSProp) modulate weight updates.
Homeostatic Plasticity vs. Regularization: The brain employs homeostatic mechanisms to maintain stability, paralleling regularization techniques like weight decay and normalization in artificial networks.
13.5.3 Credit Assignment Problem
Both biological and artificial systems face the fundamental problem of credit assignment: determining which components contributed to an outcome.
def credit_assignment_comparison():
"""Compare credit assignment in biological and artificial systems."""
fig, ax = plt.subplots(1, 2, figsize=(12, 5))
# Biological credit assignment
ax[0].set_title("Biological Credit Assignment")
ax[0].axis('off')
# Create a simple network diagram
pos = {'A': (0.2, 0.8), 'B': (0.5, 0.8), 'C': (0.8, 0.8),
'D': (0.2, 0.5), 'E': (0.5, 0.5), 'F': (0.8, 0.5),
'G': (0.2, 0.2), 'H': (0.5, 0.2), 'I': (0.8, 0.2)}
# Draw nodes
for node, position in pos.items():
circle = plt.Circle(position, 0.05, fill=True,
color='lightgray' if node not in ['A', 'I'] else 'lightblue')
ax[0].add_patch(circle)
ax[0].text(position[0], position[1], node,
ha='center', va='center', fontsize=12)
# Draw edges
edges = [('A', 'D'), ('A', 'E'), ('B', 'D'), ('B', 'E'), ('B', 'F'),
('C', 'E'), ('C', 'F'), ('D', 'G'), ('D', 'H'),
('E', 'G'), ('E', 'H'), ('E', 'I'), ('F', 'H'), ('F', 'I'),
('G', 'H'), ('G', 'I'), ('H', 'I')]
for edge in edges:
ax[0].plot([pos[edge[0]][0], pos[edge[1]][0]],
[pos[edge[0]][1], pos[edge[1]][1]],
'k-', alpha=0.6, linewidth=1)
# Highlight local feedback paths
ax[0].plot([pos['I'][0], pos['F'][0]], [pos['I'][1], pos['F'][1]],
'r-', alpha=0.7, linewidth=2)
ax[0].plot([pos['F'][0], pos['C'][0]], [pos['F'][1], pos['C'][1]],
'r-', alpha=0.7, linewidth=2)
# Add text explanation
ax[0].text(0.5, 0.02, "Relies on local feedback signals and reward modulation",
ha='center', fontsize=11)
# Artificial credit assignment
ax[1].set_title("Artificial Credit Assignment (Backpropagation)")
ax[1].axis('off')
# Use the same network layout
for node, position in pos.items():
circle = plt.Circle(position, 0.05, fill=True,
color='lightgray' if node not in ['A', 'I'] else 'lightblue')
ax[1].add_patch(circle)
ax[1].text(position[0], position[1], node,
ha='center', va='center', fontsize=12)
# Draw forward pass edges
for edge in edges:
ax[1].plot([pos[edge[0]][0], pos[edge[1]][0]],
[pos[edge[0]][1], pos[edge[1]][1]],
'k-', alpha=0.6, linewidth=1)
# Draw backward pass (gradient flow)
backward_edges = [('I', 'F'), ('I', 'E'), ('I', 'H'), ('I', 'G'),
('H', 'E'), ('H', 'D'), ('H', 'F'),
('G', 'D'), ('G', 'E'),
('F', 'C'), ('F', 'B'),
('E', 'B'), ('E', 'A'), ('E', 'C'),
('D', 'A'), ('D', 'B')]
for edge in backward_edges:
ax[1].plot([pos[edge[0]][0], pos[edge[1]][0]],
[pos[edge[0]][1], pos[edge[1]][1]],
'r-', alpha=0.4, linewidth=1, linestyle='--')
# Add text explanation
ax[1].text(0.5, 0.02, "Propagates error backwards through entire network",
ha='center', fontsize=11)
plt.tight_layout()
return figBackpropagation in artificial neural networks provides a mathematically precise solution to credit assignment but is not biologically plausible due to:
- The need for symmetric weight matrices
- Requiring precise storage of forward pass activations
- Non-local weight updates
Neuroscience research explores alternatives like:
- Three-factor Hebbian learning: Combining pre/post-synaptic activity with a global modulation signal
- Predictive coding: Using prediction errors to drive learning
- Feedback alignment: Using random feedback weights for credit assignment
20.6 13.6 Modern Deep Learning Paradigms
Deep learning has evolved rapidly in recent years, with several important new paradigms emerging.
13.6.1 Self-Supervised Learning
Self-supervised learning has emerged as a powerful paradigm that leverages unlabeled data by creating “pseudo-labels” from the data itself.
def self_supervised_paradigms():
"""Illustrate different self-supervised learning approaches."""
fig, axes = plt.subplots(2, 2, figsize=(12, 10))
# Masked Language Modeling
axes[0, 0].set_title("Masked Language Modeling")
axes[0, 0].axis('off')
text = "The [MASK] jumped over the lazy dog."
axes[0, 0].text(0.5, 0.7, text, ha='center', fontsize=12)
axes[0, 0].text(0.5, 0.4, "↓", ha='center', fontsize=20)
axes[0, 0].text(0.5, 0.2, "The fox jumped over the lazy dog.",
ha='center', fontsize=12, color='green')
# Contrastive Learning
axes[0, 1].set_title("Contrastive Learning")
axes[0, 1].axis('off')
# Draw an anchor image
rect1 = plt.Rectangle((0.3, 0.6), 0.4, 0.3, fill=True, color='lightblue')
axes[0, 1].add_patch(rect1)
axes[0, 1].text(0.5, 0.75, "Anchor", ha='center')
# Draw positive and negative examples
rect2 = plt.Rectangle((0.1, 0.2), 0.3, 0.2, fill=True, color='lightblue')
axes[0, 1].add_patch(rect2)
axes[0, 1].text(0.25, 0.3, "Positive", ha='center')
rect3 = plt.Rectangle((0.6, 0.2), 0.3, 0.2, fill=True, color='lightcoral')
axes[0, 1].add_patch(rect3)
axes[0, 1].text(0.75, 0.3, "Negative", ha='center')
# Draw attraction/repulsion arrows
axes[0, 1].arrow(0.4, 0.6, -0.1, -0.25, head_width=0.02, head_length=0.02,
fc='green', ec='green')
axes[0, 1].arrow(0.6, 0.6, 0.1, -0.25, head_width=0.02, head_length=0.02,
fc='red', ec='red')
# Autoregressive Prediction
axes[1, 0].set_title("Autoregressive Prediction")
axes[1, 0].axis('off')
text = "The fox jumped over the"
axes[1, 0].text(0.5, 0.7, text, ha='center', fontsize=12)
axes[1, 0].text(0.5, 0.4, "↓", ha='center', fontsize=20)
axes[1, 0].text(0.5, 0.2, "lazy dog.",
ha='center', fontsize=12, color='green')
# Rotation/Colorization
axes[1, 1].set_title("Image Restoration")
axes[1, 1].axis('off')
# Draw a grayscale or corrupted image
rect4 = plt.Rectangle((0.1, 0.6), 0.3, 0.3, fill=True, color='lightgray')
axes[1, 1].add_patch(rect4)
axes[1, 1].text(0.25, 0.5, "Corrupted Input", ha='center')
# Draw arrow
axes[1, 1].text(0.5, 0.7, "->", ha='center', fontsize=20)
# Draw restored image
rect5 = plt.Rectangle((0.6, 0.6), 0.3, 0.3, fill=True, color='lightblue')
axes[1, 1].add_patch(rect5)
axes[1, 1].text(0.75, 0.5, "Restored Image", ha='center')
plt.tight_layout()
return figKey self-supervised paradigms include:
- Masked Language/Image Modeling: Predicting masked tokens from surrounding context
- Contrastive Learning: Learning to distinguish between similar and dissimilar examples
- Autoregressive Prediction: Predicting next elements in a sequence
- Data Restoration: Reconstructing corrupted or modified versions of the input
Self-supervised learning has enabled state-of-the-art results across domains with limited labeled data, and forms the foundation of modern foundation models.
13.6.2 Foundation Models and Scaling Laws
Recent years have witnessed the emergence of foundation models: large-scale models pre-trained on vast amounts of data that can be adapted to various downstream tasks.
def scaling_laws():
"""Visualize scaling laws in deep learning."""
fig, ax = plt.subplots(figsize=(10, 6))
# Log scales
ax.set_xscale('log')
ax.set_yscale('log')
# Compute data points
x = np.logspace(0, 4, 100)
y_params = 0.5 * x**(-0.3) # Performance improves with model size
y_data = 0.5 * x**(-0.25) # Performance improves with data
y_compute = 0.5 * x**(-0.2) # Performance improves with compute
# Plot scaling curves
ax.plot(x, y_params, 'b-', label='Model Size Scaling')
ax.plot(x, y_data, 'r-', label='Dataset Size Scaling')
ax.plot(x, y_compute, 'g-', label='Compute Scaling')
# Add scaling regimes markers
ax.axvline(x=10, color='gray', linestyle='--', alpha=0.5)
ax.axvline(x=1000, color='gray', linestyle='--', alpha=0.5)
ax.text(5, 0.01, "Small - Models", ha='right')
ax.text(500, 0.01, "Medium - Models", ha='center')
ax.text(5000, 0.01, "Large - Models", ha='left')
# Labels
ax.set_xlabel('Scale Factor (log)')
ax.set_ylabel('Loss (log)')
ax.set_title('Scaling Laws in Deep Learning')
ax.legend()
# Emergent abilities annotation
ax.annotate('Emergent - Abilities', xy=(1000, 0.05), xytext=(500, 0.15),
arrowprops=dict(arrowstyle='->'))
plt.grid(True, which="both", ls="-", alpha=0.2)
return figKey insights from scaling research include:
- Predictable Scaling Laws: Model performance improves following power laws with increases in model size, data, and compute.
- Emergent Abilities: Beyond certain scale thresholds, models demonstrate qualitatively new capabilities not present in smaller models.
- Transfer Learning Efficiency: Large pre-trained models can be efficiently fine-tuned for downstream tasks with relatively little task-specific data.
Foundation models have transformed deep learning research and applications, with models like:
- Large Language Models: GPT, LLaMA, Claude
- Vision-Language Models: CLIP, DALL-E, Stable Diffusion
- Multimodal Models: GPT-4, Gemini
13.6.3 Loss Landscapes
 Figure 13.6: Visualization of neural network loss landscape showing the complex optimization surface with local minima, saddle points, and flat regions.
Figure 13.6: Visualization of neural network loss landscape showing the complex optimization surface with local minima, saddle points, and flat regions.
Loss landscapes in deep networks are complex, high-dimensional surfaces with many local minima, saddle points, and flat regions:
- Local Minima: Points where the loss is lower than all nearby points
- Global Minimum: The lowest possible loss value
- Saddle Points: Points with zero gradient but not minima (common in high dimensions)
- Flat Regions: Areas with very small gradients that slow training
- Sharp Minima: Minima with high curvature, often associated with poor generalization
- Wide Minima: Minima with low curvature, often associated with good generalization
Recent research suggests that most critical points in deep networks are saddle points rather than local minima, and that finding wide minima leads to better generalization.
13.5.2 Generalization Theory
Generalization is the ability of a model to perform well on unseen data:
- Empirical Risk Minimization: Minimizing loss on training data
- Structural Risk Minimization: Balancing empirical risk and model complexity
- Regularization: Constraining model complexity to improve generalization
- VC Dimension: Theoretical measure of model capacity
- Rademacher Complexity: Measure of a model’s ability to fit random noise
Modern deep learning often violates classical generalization bounds because models can memorize random data yet still generalize well on real data. This paradox has led to new theories:
- Flat Minima Hypothesis: Models that find flat regions of the loss landscape generalize better
- Implicit Regularization: Optimization methods like SGD inherently bias toward simpler solutions
- Neural Tangent Kernel: Connects neural network training to kernel methods in the infinite-width limit
13.5.3 Double Descent Phenomenon
def double_descent_curve():
"""Visualize the double descent phenomenon."""
# Model complexity (e.g., number of parameters)
complexity = np.linspace(1, 100, 1000)
# Critical complexity where model can perfectly fit training data
critical_complexity = 40
# Classical U-shaped risk curve
classical_risk = 1.0 / (complexity + 0.1) + 0.02 * complexity
# Double descent risk curve
interpolation_peak = 5.0 * np.exp(-0.2 * (complexity - critical_complexity)**2)
modern_risk = 1.0 / (complexity + 0.1) + 0.01 * np.exp(-0.05 * complexity) + interpolation_peak
# Training error (decreases monotonically)
train_error = 2.0 / (1 + np.exp(0.1 * (complexity - critical_complexity))) - 1
# Plot
plt.figure(figsize=(10, 6))
plt.plot(complexity, classical_risk, 'r--', label='Classical Theory (U-shape)')
plt.plot(complexity, modern_risk, 'b-', label='Modern Observation (Double Descent)')
plt.plot(complexity, train_error, 'g-.', label='Training Error')
# Mark interpolation threshold
plt.axvline(x=critical_complexity, color='gray', linestyle=':', alpha=0.7)
plt.text(critical_complexity + 1, 2.5, 'Interpolation Threshold', rotation=90)
# Annotate regions
plt.annotate('Underfitting', xy=(10, 1.2), xytext=(10, 2.0),
arrowprops=dict(arrowstyle='->'))
plt.annotate('Interpolation - Regime', xy=(critical_complexity, 2.5), xytext=(critical_complexity - 15, 3.5),
arrowprops=dict(arrowstyle='->'))
plt.annotate('Modern Generalization', xy=(80, 0.5), xytext=(70, 1.5),
arrowprops=dict(arrowstyle='->'))
plt.xlabel('Model Complexity')
plt.ylabel('Risk (Test Error)')
plt.title('Double Descent Phenomenon')
plt.legend()
plt.grid(True, alpha=0.3)
plt.tight_layout()
return pltThe double descent phenomenon challenges the classical bias-variance tradeoff:
Classical U-curve: As model complexity increases, test error first decreases (reducing bias), then increases (increasing variance)
Double Descent: After the interpolation threshold (where training error reaches zero), test error can decrease again with increasing model complexity
This phenomenon helps explain why overparameterized deep networks (with more parameters than training examples) can still generalize well.
13.5.4 Neural Tangent Kernel
The Neural Tangent Kernel (NTK) is a theoretical tool for understanding neural network training:
- Connects neural networks to kernel methods
- Shows that in the infinite-width limit, neural networks behave like linear models in a fixed feature space
- Explains why wide networks train stably and generalize well
- Predicts training dynamics of wide networks
While primarily theoretical, NTK insights inform network initialization and architecture design.
20.7 13.6 Autoencoders and Representation Learning
Autoencoders are neural networks trained to reconstruct their inputs through a compressed representation. They are foundational to unsupervised learning and have deep connections to information theory and brain computation.
13.6.1 The Autoencoder Architecture
An autoencoder consists of two parts:
- Encoder \(f\): Maps input \(\mathbf{x}\) to a lower-dimensional latent code \(\mathbf{z} = f(\mathbf{x})\)
- Decoder \(g\): Reconstructs the input from the code \(\hat{\mathbf{x}} = g(\mathbf{z})\)
The network is trained to minimize reconstruction loss: \[ \mathcal{L} = \|\mathbf{x} - \hat{\mathbf{x}}\|^2 = \|\mathbf{x} - g(f(\mathbf{x}))\|^2 \]
The bottleneck (latent space) forces the network to learn a compressed, efficient representation.
13.6.2 Types of Autoencoders
| Type | Key Feature | Use Case |
|---|---|---|
| Vanilla AE | Simple bottleneck | Dimensionality reduction |
| Sparse AE | Sparsity constraint on latent | Feature learning, like V1 |
| Denoising AE | Trained on corrupted inputs | Robust representations |
| Variational AE (VAE) | Probabilistic latent space | Generative modeling |
| Contractive AE | Jacobian penalty | Locally invariant features |
| β-VAE | Tunable KL weight | Disentangled representations |
13.6.3 Dense vs. Sparse Encoders: The Heart of Representation Learning
One of the most fundamental choices in designing an encoder is whether to use dense or sparse representations. This choice has profound implications for what the network learns, how it generalizes, and how closely it mirrors biological neural coding.
NoteThe Central Question
When you compress information, should every neuron participate a little bit (dense), or should only a few neurons fire strongly while most stay silent (sparse)?
This isn’t just an engineering choice. It’s a question the brain faced and solved billions of years ago. Understanding the trade-offs illuminates both neuroscience and machine learning.
Real-Life Analogy: The Library vs. The Expert Panel
Imagine you need to describe a photograph to someone who can’t see it.
Dense Encoding (The Library Approach): You give the photo to 100 librarians. Each librarian writes a paragraph covering every aspect of the image: the colors, shapes, objects, mood, composition. Every librarian contributes something about everything. To reconstruct the image, you need all 100 paragraphs, averaging their descriptions.
- ✅ Efficient compression: Each descriptor carries maximum information
- ✅ Robust to noise: Losing one librarian doesn’t lose much
- ❌ Hard to interpret: No single librarian is “the expert” on anything
- ❌ Entangled features: Changing one thing changes everything
Sparse Encoding (The Expert Panel Approach): You give the photo to 100 specialists. The “face expert” only speaks if there’s a face. The “sunset expert” only speaks if there’s a sunset. For any given photo, maybe only 5-10 experts speak up, but when they do, they’re definitive.
- ✅ Interpretable: “The face expert activated” = there’s a face
- ✅ Disentangled: Experts are independent specialists
- ✅ Efficient storage: Most experts say nothing (store only activations)
- ❌ Requires more total experts (overcomplete representations)
- ❌ Training is harder: Must learn when to stay silent
Dense Encoders: Maximum Information in Minimum Dimensions
A dense encoder creates representations where most or all neurons are active for every input. The classic example is PCA or a standard autoencoder with a narrow bottleneck.
Mathematical Formulation:
For input \(\mathbf{x} \in \mathbb{R}^n\) and latent code \(\mathbf{z} \in \mathbb{R}^k\) where \(k \ll n\):
\[ \mathbf{z} = f_\theta(\mathbf{x}) = \sigma(W\mathbf{x} + b) \]
All \(k\) dimensions of \(\mathbf{z}\) are typically non-zero. The information about \(\mathbf{x}\) is distributed across all dimensions.
Properties of Dense Representations:
| Property | Dense Encoder Behavior |
|---|---|
| Activation pattern | All neurons active (continuous values) |
| Information distribution | Spread across all dimensions |
| Dimensionality | Typically undercomplete (\(k < n\)) |
| Interpretability | Individual dimensions often meaningless |
| Reconstruction | All dimensions needed |
| Biological analog | Population codes, motor cortex |
When to Use Dense Encoders: - Dimensionality reduction (like PCA) - When you need maximum compression - Pre-training for downstream tasks - When interpretability isn’t required
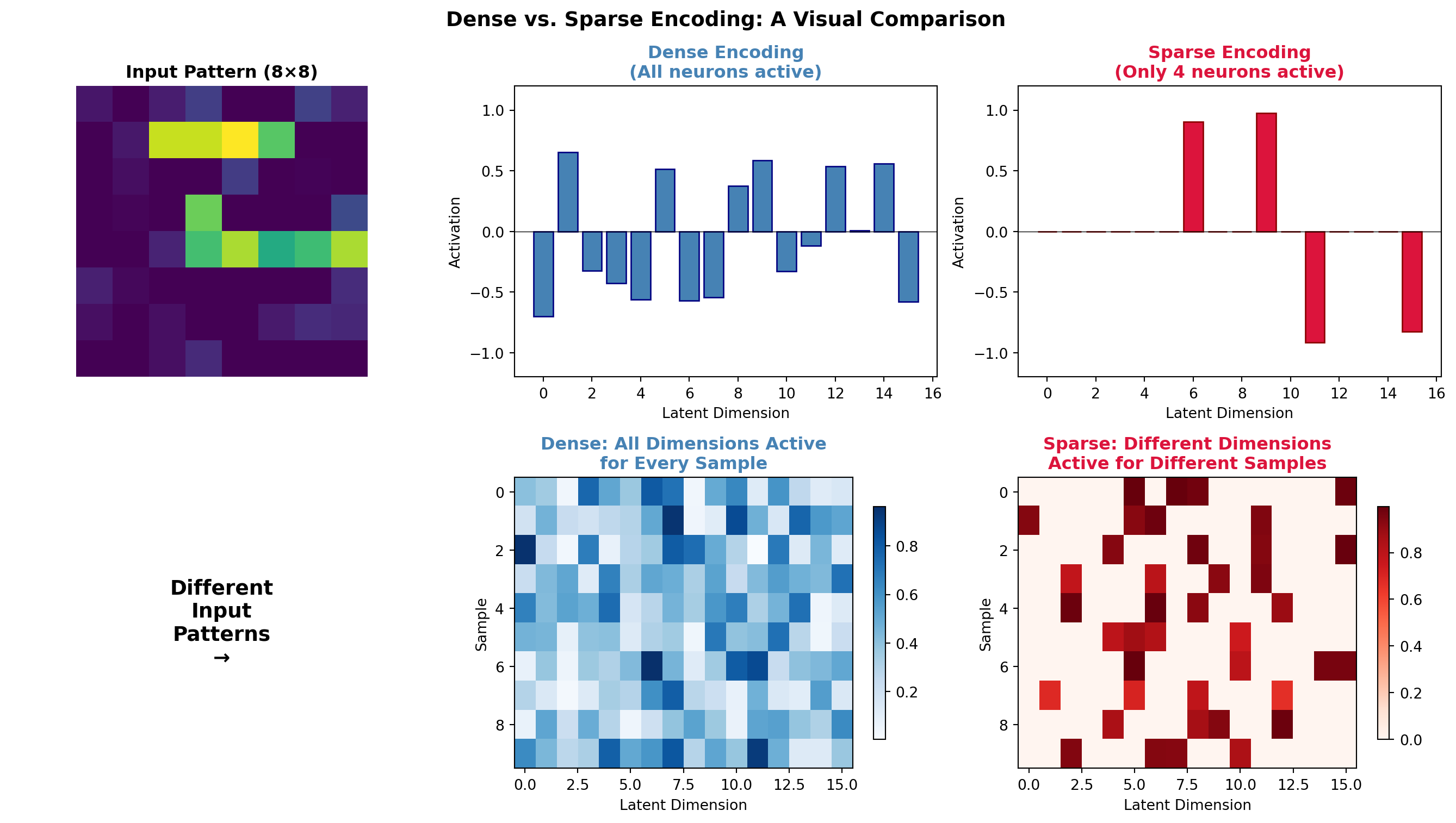
============================================================
ENCODING STATISTICS
============================================================
Dense encoding - Mean active neurons: 15.9 / 16
Sparse encoding - Mean active neurons: 4.0 / 16
Dense code entropy (information spread): 2.58Sparse Encoders: The Brain’s Strategy
Sparse encoders create representations where only a small fraction of neurons are active for any given input. This is not just a computational trick. It’s the dominant coding strategy in the brain.
ImportantThe Sparse Coding Hypothesis
In the primary visual cortex (V1), only about 1-5% of neurons are strongly active at any moment, even when viewing complex natural scenes. This sparse, distributed code is metabolically efficient and creates representations that are robust, interpretable, and well-suited for learning.
Olshausen & Field (1996), “Emergence of simple-cell receptive field properties by learning a sparse code for natural images”
Why Sparsity? Three Compelling Reasons:
Metabolic Efficiency: Neurons are expensive to fire. Sparse coding minimizes energy use.
Increased Capacity: With sparse codes, you can store more patterns without interference. If each pattern activates different neurons, they don’t overwrite each other.
Interpretability: When a specific neuron fires, it means something. “Grandmother cells” are an extreme example, but even moderate sparsity creates meaningful selectivity.
Mathematical Formulation:
A sparse autoencoder adds a sparsity penalty to the loss:
\[ \mathcal{L} = \underbrace{\|\mathbf{x} - \hat{\mathbf{x}}\|^2}_{\text{Reconstruction}} + \underbrace{\lambda \sum_j |z_j|}_{\text{L1 Sparsity}} + \underbrace{\beta \sum_j KL(\rho \| \hat{\rho}_j)}_{\text{KL Sparsity (optional)}} \]
Where: - \(\lambda\) controls the strength of L1 regularization (drives activations to exactly zero) - \(\rho\) is the target sparsity (e.g., 0.05 = want 5% average activation) - \(\hat{\rho}_j\) is the actual average activation of neuron \(j\) - \(\beta\) controls KL divergence penalty strength
Types of Sparsity Constraints:
| Method | Formula | Effect |
|---|---|---|
| L1 Penalty | \(\lambda \sum_j |z_j|\) | Drives small activations to zero |
| KL Divergence | \(KL(\rho \| \hat{\rho})\) | Controls average activation rate |
| k-Sparse | Keep top-k, zero rest | Exactly k neurons active |
| Winner-Take-All | Only max neuron active | Extreme sparsity (k=1) |
| Lifetime Sparsity | Track usage over time | Each neuron used equally often |
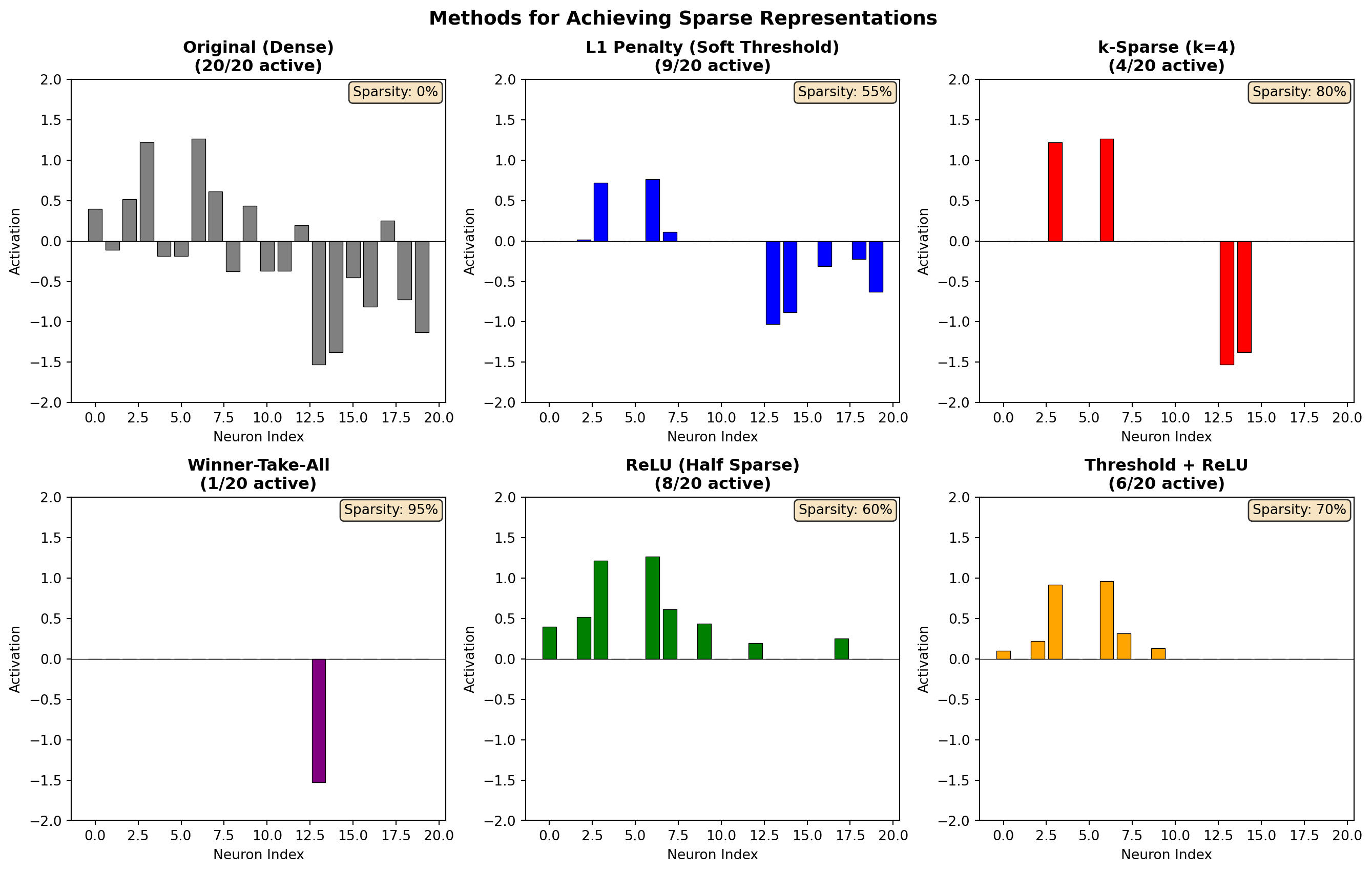
Understanding KL Divergence Sparsity
KL divergence works differently from L1. It controls the average activation rate across a batch of inputs rather than penalizing individual activations.
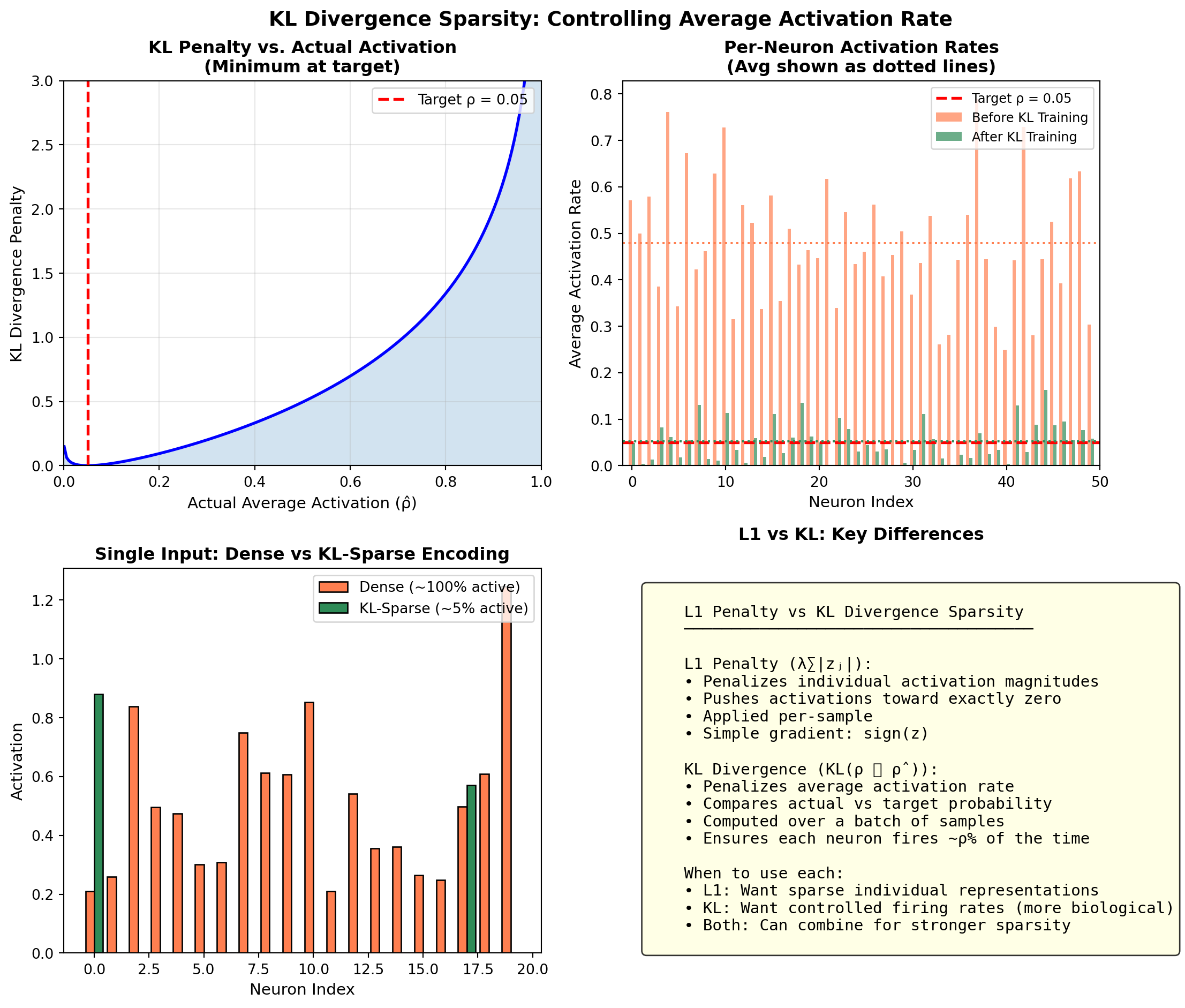
The Neuroscience of Sparse Coding: Lessons from V1
The primary visual cortex (V1) is the brain’s first major visual processing station. Its neurons have become a Rosetta Stone for understanding neural coding.
Key Finding: When Olshausen and Field (1996) trained a sparse autoencoder on natural images, the learned features spontaneously resembled V1 simple cell receptive fields: oriented, localized Gabor-like filters.
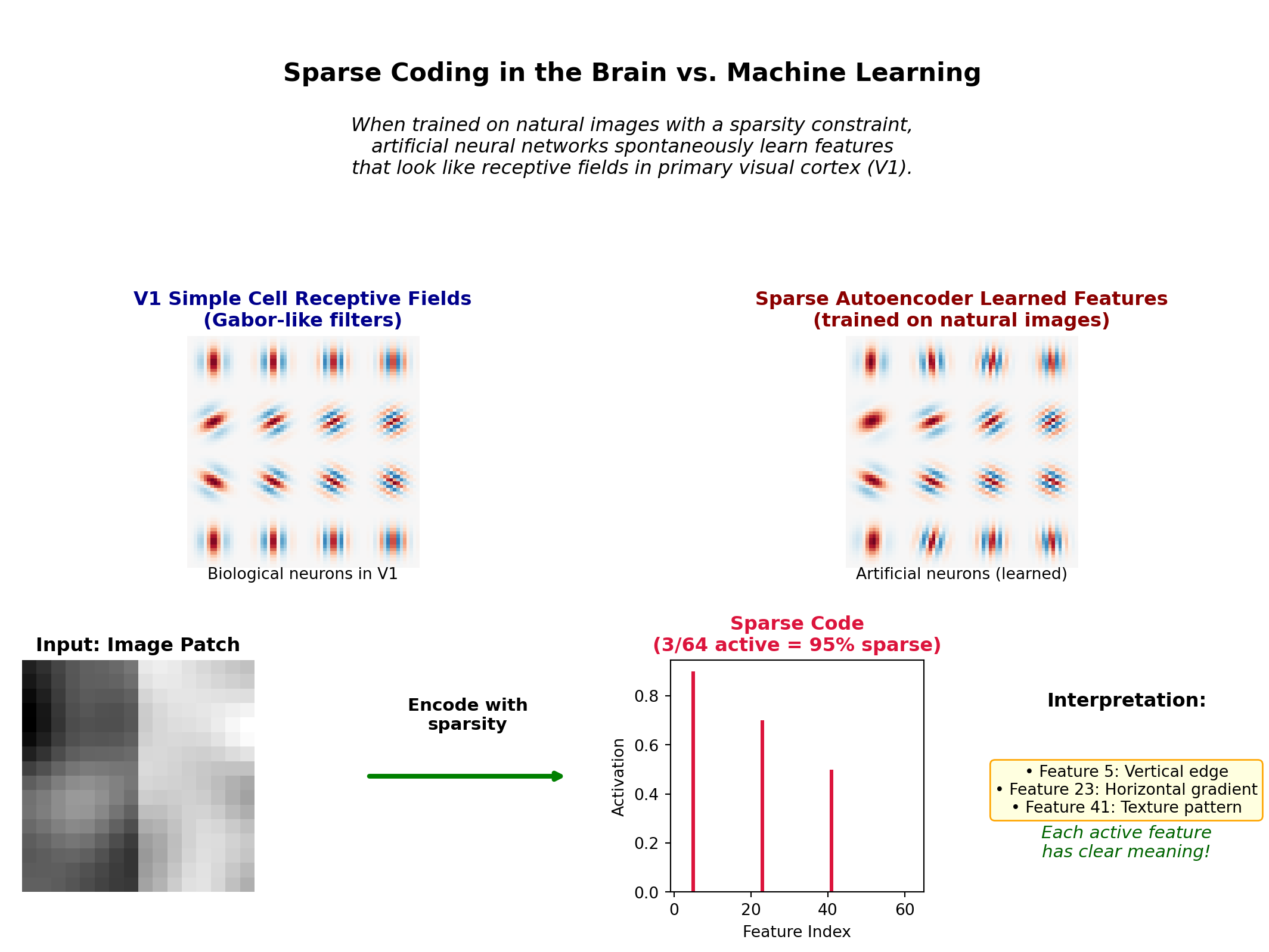
Why Does the Brain Use Sparse Coding?
| Reason | Explanation | AI Benefit |
|---|---|---|
| Metabolic efficiency | Neurons cost energy; silence is cheap | Lower compute, smaller memory |
| Storage capacity | Sparse patterns don’t interfere | More patterns stored without overwriting |
| Fast learning | Few active neurons = credit assignment is easier | Clearer gradients, faster convergence |
| Robustness | Features are independent; noise affects few | Better generalization |
| Compositionality | Complex scenes = sum of simple features | Modular, reusable representations |
Implementing a Sparse Autoencoder
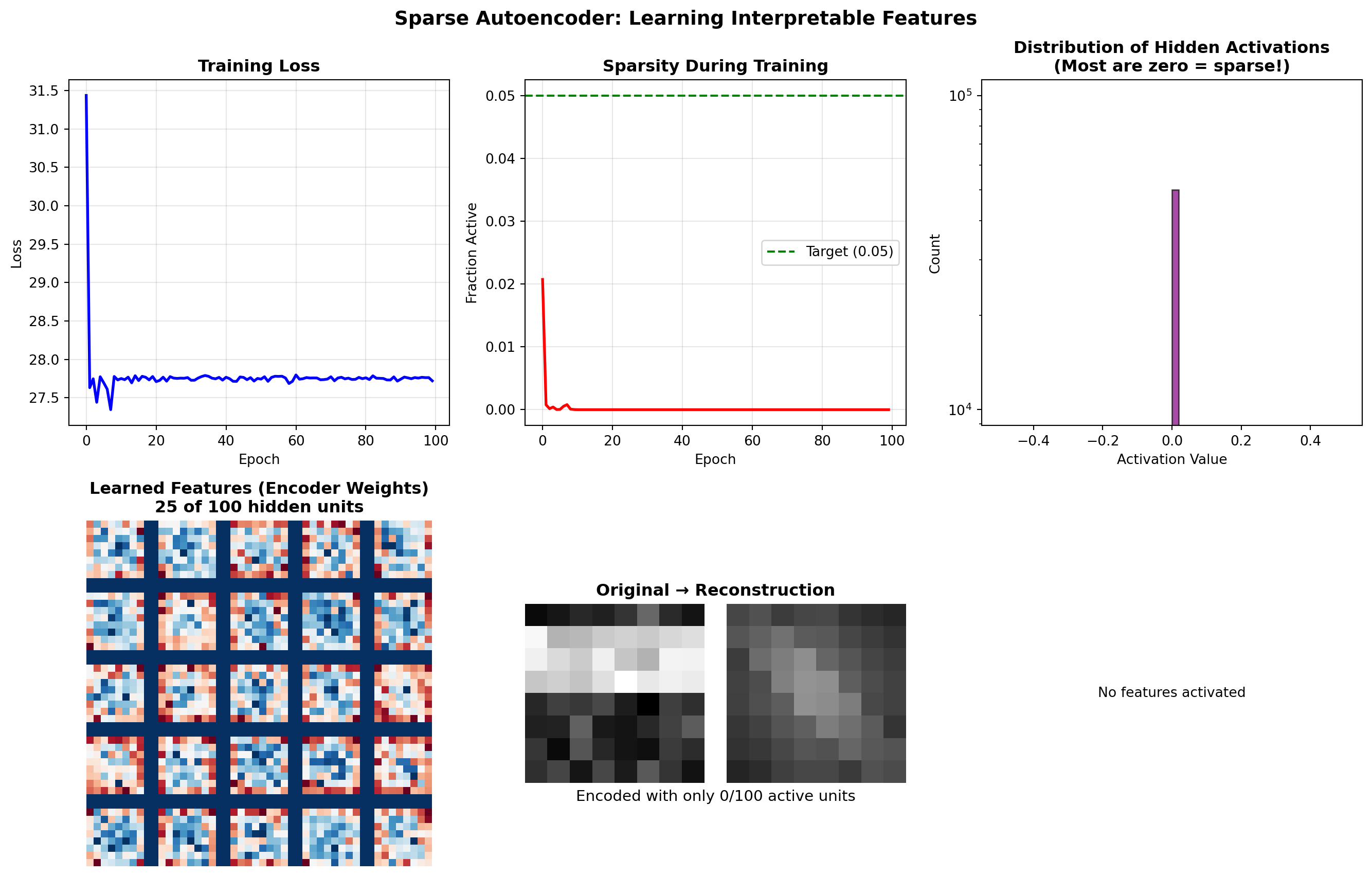
============================================================
SPARSE AUTOENCODER SUMMARY
============================================================
Architecture: 64 → 100 → 64 (overcomplete)
Final sparsity: 0.0% of neurons active on average
Target sparsity: 5.0%Dense vs. Sparse: Head-to-Head Comparison
| Aspect | Dense Encoder | Sparse Encoder |
|---|---|---|
| Architecture | Undercomplete (narrow bottleneck) | Often overcomplete (wide hidden layer) |
| Activation pattern | All neurons active | Few neurons active (<10%) |
| Information storage | Distributed holistically | Localized per feature |
| Interpretability | Low (entangled) | High (each neuron = feature) |
| Reconstruction | Need all dimensions | Need only active dimensions |
| Biological analog | Motor cortex, population codes | V1, hippocampus |
| Training | Standard backprop | Need sparsity regularization |
| Memory efficiency | Dense activations stored | Only store non-zero indices |
| Best for | Compression, PCA-like reduction | Feature learning, interpretability |
When to Use Which?
TipDecision Guide
Use Dense Encoding when: - Your goal is maximum compression - You have limited latent dimensions - Interpretability doesn’t matter - Downstream task will learn to decode
Use Sparse Encoding when: - You want interpretable features - You need biological plausibility - Memory/compute at inference is limited - You want features that transfer across tasks - Working with high-dimensional overcomplete representations
Code Example: Comparing Dense and Sparse Autoencoders
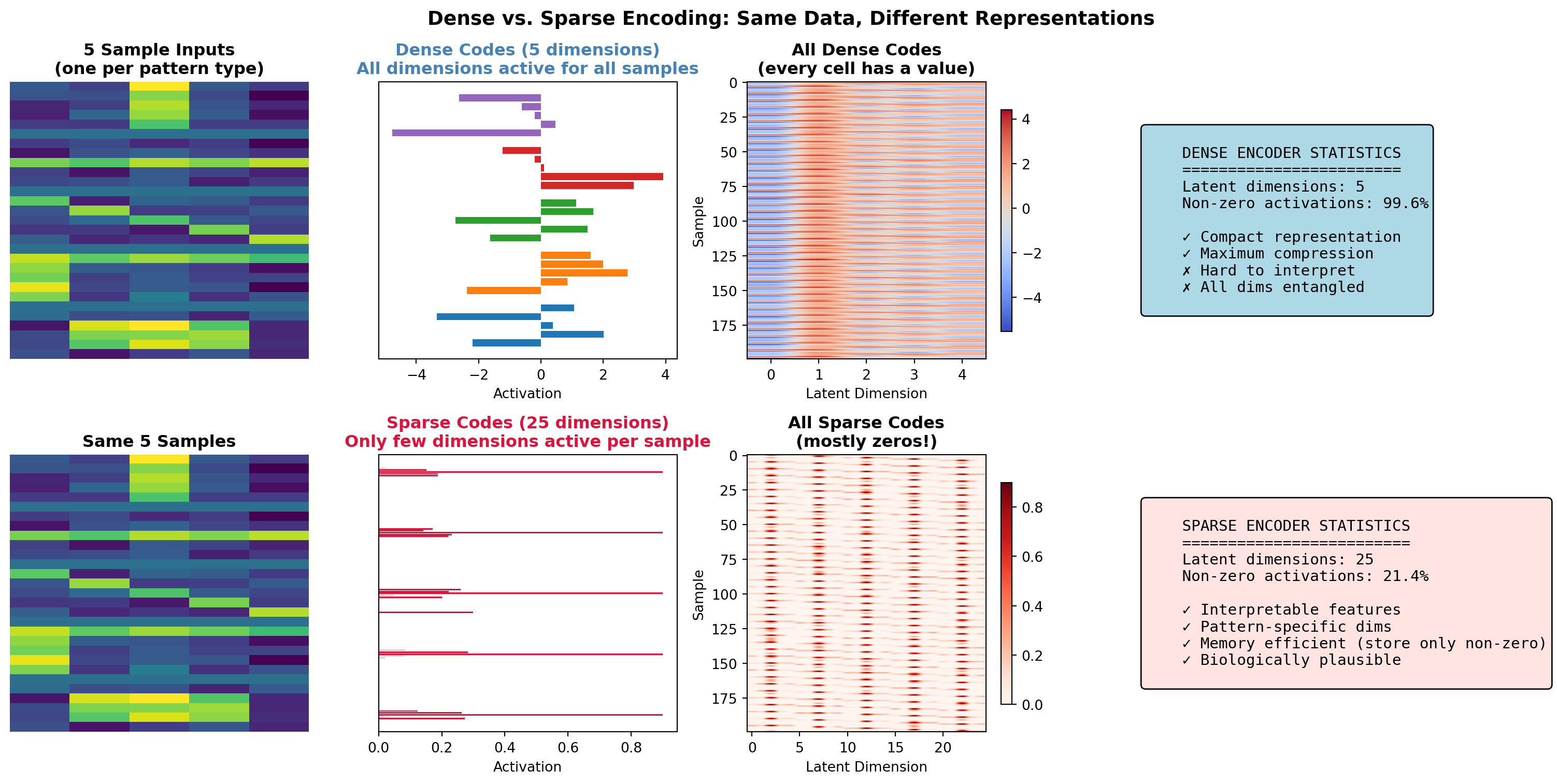
Summary: The Encoding Spectrum
The choice between dense and sparse encoding isn’t binary. It’s a spectrum:
DENSE SPARSE
←―――――――――――――――――――――――――――――――――――――――――――――――――――――――――→
PCA Standard AE Denoising AE L1-Sparse AE k-Sparse Winner-Take-All
All neurons Mild sparsity Strong sparsity Only 1 neuron
active (dropout helps) (5-10% active) activeThe brain operates across this spectrum too: - Motor cortex: Dense population codes (all neurons contribute) - V1: Sparse coding (few neurons per stimulus) - Hippocampus: Very sparse (place cells) - Concept neurons: Extremely sparse (grandmother cells?)
Understanding this spectrum is essential for designing neural networks that balance efficiency, interpretability, and biological plausibility.
13.6.4 Variational Autoencoders (VAEs)
VAEs add a probabilistic twist: the encoder outputs parameters of a distribution, not a point:
\[ q_\phi(\mathbf{z}|\mathbf{x}) = \mathcal{N}(\boldsymbol{\mu}_\phi(\mathbf{x}), \boldsymbol{\sigma}^2_\phi(\mathbf{x})) \]
The loss function combines reconstruction and a KL divergence regularizer:
\[ \mathcal{L}_{VAE} = \underbrace{\mathbb{E}_{q}[\log p_\theta(\mathbf{x}|\mathbf{z})]}_{\text{Reconstruction}} - \underbrace{D_{KL}(q_\phi(\mathbf{z}|\mathbf{x}) \| p(\mathbf{z}))}_{\text{Regularization}} \]
The KL term encourages the latent space to be smooth and continuous, enabling generation of new samples.
def vae_latent_space_demo():
"""
Visualize the difference between AE and VAE latent spaces.
"""
np.random.seed(42)
# Simulate latent space samples
n_samples = 300
# Standard AE: Clustered, non-continuous latent space
ae_latent = np.concatenate([
np.random.randn(100, 2) * 0.3 + np.array([-2, -2]),
np.random.randn(100, 2) * 0.3 + np.array([2, -2]),
np.random.randn(100, 2) * 0.3 + np.array([0, 2]),
])
ae_labels = np.concatenate([np.zeros(100), np.ones(100), 2 * np.ones(100)])
# VAE: Smooth, continuous latent space (approximately Gaussian)
vae_latent = np.random.randn(n_samples, 2)
# Color by angle to show structure
vae_labels = np.arctan2(vae_latent[:, 1], vae_latent[:, 0])
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
# AE latent space
scatter1 = axes[0].scatter(ae_latent[:, 0], ae_latent[:, 1], c=ae_labels, cmap='tab10', s=20, alpha=0.7)
axes[0].set_title('Standard Autoencoder Latent Space')
axes[0].set_xlabel('z₁')
axes[0].set_ylabel('z₂')
axes[0].annotate('Gaps between\nclusters', xy=(0, 0), fontsize=10,
bbox=dict(boxstyle='round', facecolor='wheat', alpha=0.5))
# VAE latent space
scatter2 = axes[1].scatter(vae_latent[:, 0], vae_latent[:, 1], c=vae_labels, cmap='hsv', s=20, alpha=0.7)
axes[1].set_title('VAE Latent Space (KL regularized)')
axes[1].set_xlabel('z₁')
axes[1].set_ylabel('z₂')
# Draw unit circle to show prior
theta = np.linspace(0, 2 * np.pi, 100)
axes[1].plot(np.cos(theta), np.sin(theta), 'k--', alpha=0.3, label='Prior N(0,1)')
axes[1].legend()
plt.tight_layout()
return ae_latent, vae_latent
# ae_z, vae_z = vae_latent_space_demo()13.6.4 The Reparameterization Trick
To backpropagate through stochastic sampling, VAEs use the reparameterization trick:
Instead of sampling \(\mathbf{z} \sim \mathcal{N}(\boldsymbol{\mu}, \boldsymbol{\sigma}^2)\), we compute: \[ \mathbf{z} = \boldsymbol{\mu} + \boldsymbol{\sigma} \odot \boldsymbol{\epsilon}, \quad \boldsymbol{\epsilon} \sim \mathcal{N}(0, \mathbf{I}) \]
This moves the stochasticity outside the computational graph, enabling standard backpropagation.
13.6.5 Neuroscience Connections
Autoencoders have profound connections to brain computation:
| Autoencoder Concept | Brain Analog |
|---|---|
| Bottleneck compression | Efficient coding (Ch 7) |
| Sparse coding | V1 sparse representations |
| Reconstruction | Predictive coding top-down predictions |
| Latent space | Neural manifolds |
| Denoising | Robust sensory processing |
| Hierarchical AE | Cortical hierarchy |
TipThe Information Bottleneck View
Autoencoders implement the information bottleneck principle: compress the input while preserving information relevant for reconstruction. This is precisely what the brain must do: compress high-dimensional sensory data into low-dimensional neural codes while preserving behaviorally relevant information. See Chapter 7 for the information-theoretic foundations.
13.6.6 Code Lab: Building a VAE
def build_vae_conceptual():
"""
Conceptual implementation of a VAE architecture.
(Full implementation would use PyTorch/TensorFlow)
"""
# Architecture diagram
architecture = """
VAE Architecture:
INPUT (x)
│
▼
┌─────────┐
│ ENCODER │ (neural network)
└────┬────┘
│
┌────┴────┐
│ │ │
▼ ▼ ▼
μ σ (parameters of q(z|x))
│ │
└─┬──┘
│ z = μ + σ * ε (reparameterization)
│ ε ~ N(0, I)
▼
┌─────────┐
│ DECODER │ (neural network)
└────┬────┘
│
▼
OUTPUT (x̂)
Loss = Reconstruction + β * KL(q(z|x) || p(z))
"""
print(architecture)
# Demonstrate the loss components
def vae_loss_components(x, x_recon, mu, log_var, beta=1.0):
"""
Compute VAE loss components.
Args:
x: Original input
x_recon: Reconstructed input
mu: Mean of latent distribution
log_var: Log variance of latent distribution
beta: Weight on KL term (beta-VAE)
"""
# Reconstruction loss (MSE or BCE depending on data)
recon_loss = np.mean((x - x_recon) ** 2)
# KL divergence: D_KL(N(μ, σ²) || N(0, 1))
# = -0.5 * Σ(1 + log(σ²) - μ² - σ²)
kl_loss = -0.5 * np.mean(1 + log_var - mu ** 2 - np.exp(log_var))
total_loss = recon_loss + beta * kl_loss
return {
'reconstruction': recon_loss,
'kl_divergence': kl_loss,
'total': total_loss,
'beta': beta
}
# Example
np.random.seed(42)
x = np.random.randn(32, 784) # Batch of 32 MNIST-like images
x_recon = x + np.random.randn(32, 784) * 0.1 # Noisy reconstruction
mu = np.random.randn(32, 20) * 0.5 # 20-dim latent
log_var = np.random.randn(32, 20) * 0.1 - 1
losses = vae_loss_components(x, x_recon, mu, log_var, beta=1.0)
print("\nVAE Loss Components:")
print(f" Reconstruction Loss: {losses['reconstruction']:.4f}")
print(f" KL Divergence: {losses['kl_divergence']:.4f}")
print(f" Total Loss (β={losses['beta']}): {losses['total']:.4f}")
return losses
# losses = build_vae_conceptual()13.6.7 Applications of Autoencoders
- Dimensionality Reduction: Nonlinear alternative to PCA
- Anomaly Detection: High reconstruction error indicates anomalies
- Denoising: Learn to remove noise from corrupted inputs
- Generative Modeling: VAEs can generate new samples
- Representation Learning: Pre-train encoders for downstream tasks
- Neural Data Analysis: Discover latent structure in neural recordings (Ch 24)
20.8 13.7 Code Lab: Implementing a Neural Network from Scratch
Let’s implement a simple neural network without using deep learning frameworks to understand the core concepts better:
def neural_network_from_scratch():
"""Implement a simple neural network from scratch."""
# Define network architecture
input_size = 2
hidden_size = 3
output_size = 1
# Generate synthetic data
np.random.seed(42)
X = np.random.randn(100, input_size)
# True function: XOR-like (non-linear)
y = np.array([(x[0] > 0) != (x[1] > 0) for x in X]).reshape(-1, 1).astype(float)
# Initialize weights and biases
def init_params():
np.random.seed(42)
W1 = np.random.randn(input_size, hidden_size) * 0.1
b1 = np.zeros((1, hidden_size))
W2 = np.random.randn(hidden_size, output_size) * 0.1
b2 = np.zeros((1, output_size))
return {'W1': W1, 'b1': b1, 'W2': W2, 'b2': b2}
# Activation functions
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def sigmoid_derivative(x):
s = sigmoid(x)
return s * (1 - s)
# Forward pass
def forward(X, params):
W1, b1, W2, b2 = params['W1'], params['b1'], params['W2'], params['b2']
# Hidden layer
Z1 = X @ W1 + b1
A1 = sigmoid(Z1)
# Output layer
Z2 = A1 @ W2 + b2
A2 = sigmoid(Z2)
cache = {'Z1': Z1, 'A1': A1, 'Z2': Z2, 'A2': A2, 'X': X}
return A2, cache
# Compute loss
def compute_loss(A2, y):
m = y.shape[0]
loss = -np.sum(y * np.log(A2 + 1e-8) + (1 - y) * np.log(1 - A2 + 1e-8)) / m
return loss
# Backward pass
def backward(cache, y, params):
m = y.shape[0]
W1, W2 = params['W1'], params['W2']
A1, A2 = cache['A1'], cache['A2']
X = cache['X']
# Output layer
dZ2 = A2 - y
dW2 = A1.T @ dZ2 / m
db2 = np.sum(dZ2, axis=0, keepdims=True) / m
# Hidden layer
dA1 = dZ2 @ W2.T
dZ1 = dA1 * sigmoid_derivative(cache['Z1'])
dW1 = X.T @ dZ1 / m
db1 = np.sum(dZ1, axis=0, keepdims=True) / m
gradients = {'dW1': dW1, 'db1': db1, 'dW2': dW2, 'db2': db2}
return gradients
# Update parameters
def update_params(params, gradients, learning_rate):
params['W1'] -= learning_rate * gradients['dW1']
params['b1'] -= learning_rate * gradients['db1']
params['W2'] -= learning_rate * gradients['dW2']
params['b2'] -= learning_rate * gradients['db2']
return params
# Training loop
def train(X, y, hidden_size, learning_rate, epochs):
# Initialize parameters
params = init_params()
# Track loss
losses = []
# Training iterations
for i in range(epochs):
# Forward pass
A2, cache = forward(X, params)
# Compute loss
loss = compute_loss(A2, y)
losses.append(loss)
# Backward pass
gradients = backward(cache, y, params)
# Update parameters
params = update_params(params, gradients, learning_rate)
# Print loss every 1000 epochs
if i % 1000 == 0:
print(f"Epoch {i}, Loss: {loss:.4f}")
return params, losses
# Train the network
params, losses = train(X, y, hidden_size, learning_rate=0.5, epochs=5000)
# Visualize the results
def visualize_results():
# Visualization of training progress
plt.figure(figsize=(12, 5))
# Loss curve
plt.subplot(1, 2, 1)
plt.plot(losses)
plt.title('Training Loss')
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.grid(True)
# Decision boundary
plt.subplot(1, 2, 2)
# Create a mesh grid
h = 0.01
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
# Make predictions on the mesh grid
Z, _ = forward(np.c_[xx.ravel(), yy.ravel()], params)
Z = Z.reshape(xx.shape)
# Plot decision boundary
plt.contourf(xx, yy, Z, cmap=plt.cm.Spectral, alpha=0.8)
# Plot training examples
plt.scatter(X[:, 0], X[:, 1], c=y.ravel(), cmap=plt.cm.Spectral, edgecolors='k')
plt.title('Decision Boundary')
plt.xlabel('Feature 1')
plt.ylabel('Feature 2')
plt.tight_layout()
return plt
return visualize_results()This implementation demonstrates the core components of neural networks:
- Forward Propagation: Computing activations through the network
- Loss Calculation: Measuring how far predictions are from targets
- Backward Propagation: Computing gradients for each parameter
- Parameter Updates: Adjusting weights and biases using gradients
While modern deep learning frameworks automate these steps, understanding the underlying mechanics is crucial for debugging, customization, and optimization.
20.9 13.8 Take-aways
Framework Abstraction: Modern deep learning frameworks like PyTorch and TensorFlow abstract low-level details, allowing researchers to focus on architecture design and experimentation.
Training Stability: Achieving stable training requires careful attention to initialization, normalization, learning rates, and gradient flow.
Regularization Importance: Regularization techniques critically impact model generalization, with techniques like dropout, batch normalization, and weight decay combining for best results.
Architectural Innovations: Advances like residual connections enable training of extremely deep networks by mitigating gradient flow issues.
Optimization Challenges: Deep learning optimization remains challenging due to non-convex loss landscapes, saddle points, and the need to escape poor local minima.
Empirical Focus: Despite theoretical progress, deep learning remains heavily empirical, with practical techniques often preceding theoretical understanding.
```zbtgbcnjthwwyc: Chapter Summary :class: important
In this chapter, we explored:
- Neural network fundamentals including multilayer perceptrons and the mathematics of backpropagation
- Activation functions from sigmoid and tanh to modern variants like ReLU, GELU, and Swish
- The vanishing/exploding gradient problem and techniques to address it
- Optimization algorithms such as SGD, momentum, Adam, and second-order methods
- Learning rate scheduling approaches that adapt optimization dynamics during training
- Regularization techniques including dropout, batch normalization, and weight decay
- Advanced architectures like convolutional neural networks, residual networks, and graph neural networks
- Biological parallels between deep learning systems and neural computations in the brain
- Modern paradigms such as self-supervised learning and foundation models
- Theoretical frameworks including loss landscapes, generalization theory, and neural tangent kernels
This chapter provides a comprehensive overview of deep learning fundamentals, from the mathematical principles that enable training to practical techniques that improve performance, while highlighting both the technological innovations and biological inspirations that shape modern neural networks.
```{"admonition"}: Knowledge Connections
:class: important
**Looking Back**
- **Chapter 1 (Introduction)**: The backpropagation algorithm introduced in section 1.1.3 is explored in depth here, showing how it enables training of complex neural networks.
- **Chapter 2 (Neuroscience Foundations)**: The biological learning mechanisms described in section 2.3 provide an interesting contrast to the optimization algorithms covered in this chapter.
- **Chapter 7 (Information Theory)**: The information bottleneck principle (section 7.6) provides theoretical insights into how deep networks compress information through layers.
- **Chapter 9 (ML Foundations)**: The basic learning algorithms from Chapter 9 are extended here to handle deep architectures and large-scale training.
**Looking Forward**
- **Chapter 11 (Sequence Models)**: The optimization techniques learned here will be applied to the specialized architectures for sequential data.
- **Chapter 12 (Large Language Models)**: The scaling laws and foundation model concepts introduced in section 13.6.2 become critical for understanding LLM training and capabilities.
- **Chapter 14 (Future Directions)**: The biological parallels in deep learning (section 13.5) point to neuromorphic approaches that may shape future AI systems.20.10 13.9 Exercises
Conceptual Questions
Explain the vanishing and exploding gradient problems in deep networks. Why do these problems occur during backpropagation through many layers? How do modern techniques like residual connections, batch normalization, and careful initialization help mitigate these issues?
Compare different activation functions and their properties. For each of ReLU, sigmoid, tanh, and variants (Leaky ReLU, ELU, Swish):
- Describe the function mathematically
- Explain when it saturates (if at all)
- Discuss its gradient properties
- Provide use cases where it’s preferred
Explain the bias-variance trade-off in deep learning. How do deep networks with millions of parameters avoid overfitting despite classical statistical theory suggesting they should? Discuss the roles of implicit regularization in SGD, dropout, data augmentation, and the double descent phenomenon.
Describe the function of batch normalization beyond just normalization. Beyond reducing internal covariate shift, what other effects does batch normalization have on the loss landscape smoothness, learning rate sensitivity, gradient flow, and implicit regularization?
Computational Exercises
- Implement backpropagation from scratch. Write code to:
- Build a simple feedforward network without using autograd
- Manually implement forward and backward passes for linear and ReLU layers
- Compute gradients using the chain rule
- Train on a simple dataset (e.g., XOR or MNIST)
- Verify your gradients using numerical differentiation
- Compare performance to a framework implementation (PyTorch/TensorFlow)
- Analyze the effect of network depth. Implement:
- Networks with 2, 5, 10, and 20 layers on the same task
- Measure: training time, convergence speed, final test accuracy
- Visualize gradient magnitudes at different layers during training
- Add residual connections to the deep network and compare results
- Discuss the empirical benefits and costs of depth
- Compare optimization algorithms. Implement and compare:
- SGD, SGD with momentum, RMSProp, Adam
- Use the same network architecture and dataset
- Plot loss curves, learning rate schedules, and convergence speed
- Measure sensitivity to learning rate choice for each
- Discuss when you would prefer each optimizer
- Investigate regularization techniques. Create:
- A network prone to overfitting (large capacity, small dataset)
- Compare: no regularization, L2 regularization, dropout, data augmentation, early stopping
- Plot training vs. validation curves for each
- Measure the test accuracy for each method
- Combine multiple techniques and analyze the effect
Discussion Questions
- Deep learning and biological plausibility. Discuss:
- What aspects of backpropagation are biologically implausible (weight symmetry, separate forward/backward passes, etc.)?
- What are alternative learning algorithms that are more biologically plausible (e.g., feedback alignment, target propagation)?
- Do biological plausibility constraints matter for AI performance, or only for understanding the brain?
- Could insights from neuroscience lead to better training algorithms for deep networks?
- The future of deep learning architectures. Consider:
- Are we approaching the limits of what can be achieved by scaling current architectures?
- What role will inductive biases (like convolution, attention) play versus fully general architectures?
- How might sparsity (in activations, weights, or gradients) change deep learning?
- What are the next frontiers: multimodal models, continual learning, energy efficiency, or something else?
- Ethics and environmental impact of deep learning. Reflect on:
- The carbon footprint of training large models and how to mitigate it
- The trade-off between model performance and environmental cost
- Whether the democratization of AI is helped or hindered by the trend toward larger models
- How research priorities should balance pushing capabilities forward with efficiency and accessibility
20.11 13.10 References
Goodfellow, I., Bengio, Y., & Courville, A. (2016). Deep Learning. MIT Press.
LeCun, Y., Bengio, Y., & Hinton, G. (2015). Deep learning. Nature, 521(7553), 436-444.
Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012). ImageNet classification with deep convolutional neural networks. Advances in Neural Information Processing Systems, 25, 1097-1105.
He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep residual learning for image recognition. IEEE Conference on Computer Vision and Pattern Recognition, 770-778.
Kingma, D. P., & Ba, J. (2015). Adam: A method for stochastic optimization. International Conference on Learning Representations.
Ioffe, S., & Szegedy, C. (2015). Batch normalization: Accelerating deep network training by reducing internal covariate shift. International Conference on Machine Learning, 448-456.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I., & Salakhutdinov, R. (2014). Dropout: A simple way to prevent neural networks from overfitting. Journal of Machine Learning Research, 15(1), 1929-1958.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones, L., Gomez, A. N., et al. (2017). Attention is all you need. Advances in Neural Information Processing Systems, 30, 5998-6008.
Smith, L. N. (2018). A disciplined approach to neural network hyper-parameters: Part 1 - learning rate, batch size, momentum, and weight decay. arXiv preprint arXiv:1803.09820.
Zhang, C., Bengio, S., Hardt, M., Recht, B., & Vinyals, O. (2021). Understanding deep learning (still) requires rethinking generalization. Communications of the ACM, 64(3), 107-115.
Li, H., Xu, Z., Taylor, G., Studer, C., & Goldstein, T. (2018). Visualizing the loss landscape of neural nets. Advances in Neural Information Processing Systems, 31, 6389-6399.
Jacot, A., Gabriel, F., & Hongler, C. (2018). Neural tangent kernel: Convergence and generalization in neural networks. Advances in Neural Information Processing Systems, 31, 8571-8580.